Collision-free transport of 2D deformable objects
Herguedas, Rafael (Universidad de Zaragoza) ; Lopez-Nicolas, Gonzalo (Universidad de Zaragoza) ; Sagues, Carlos (Universidad de Zaragoza)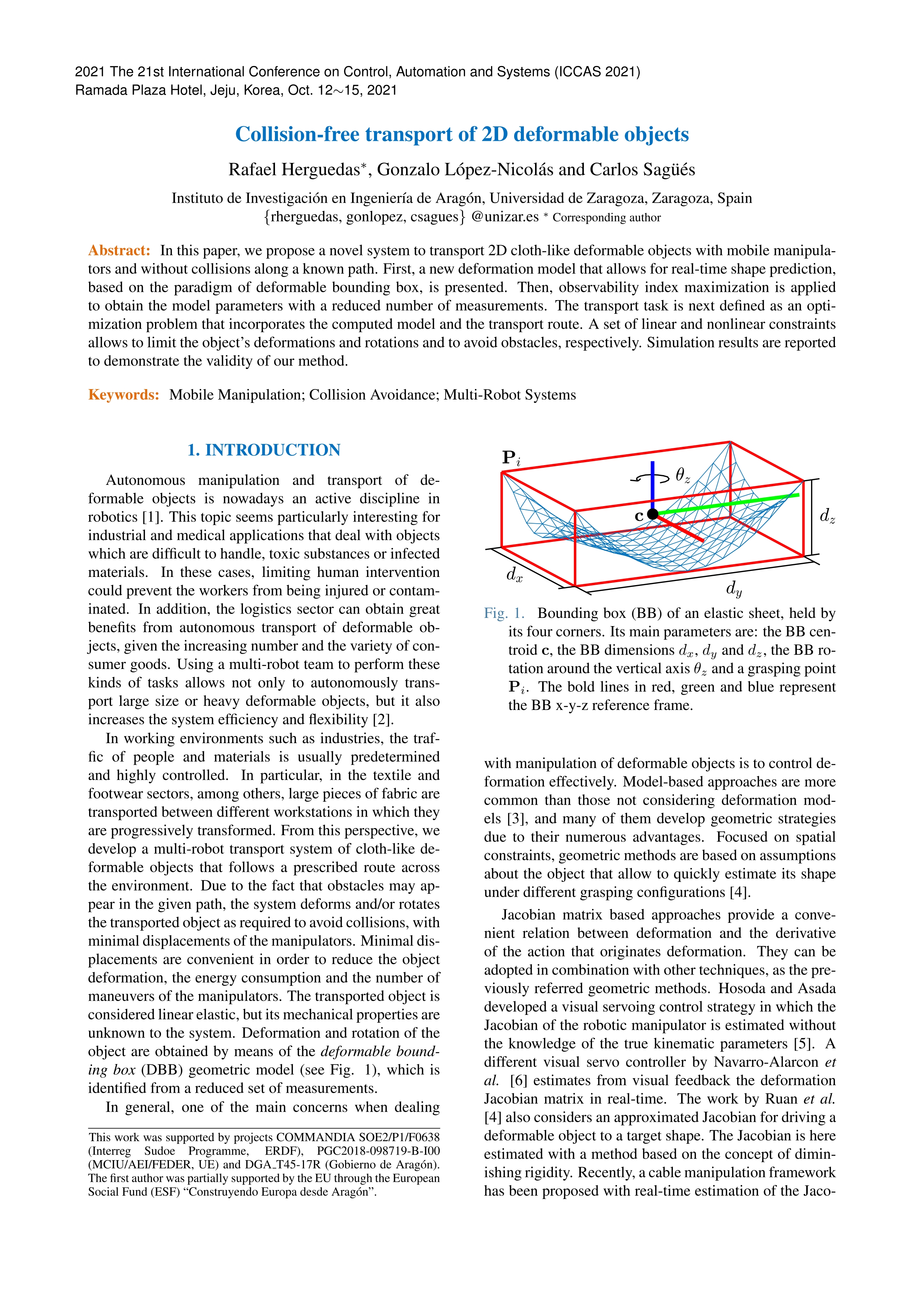
Resumen: In this paper, we propose a novel system to transport 2D cloth-like deformable objects with mobile manipulators and without collisions along a known path. First, a new deformation model that allows for real-time shape prediction, based on the paradigm of deformable bounding box, is presented. Then, observability index maximization is applied to obtain the model parameters with a reduced number of measurements. The transport task is next defined as an optimization problem that incorporates the computed model and the transport route. A set of linear and nonlinear constraints allows to limit the object's deformations and rotations and to avoid obstacles, respectively. Simulation results are reported to demonstrate the validity of our method
Idioma: Inglés
DOI: 10.23919/ICCAS52745.2021.9650027
Año: 2021
Publicado en: International Conference on Control, Automation and Systems 21 (2021)
ISSN: 1598-7833
Tipo y forma: Comunicación congreso (PostPrint)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
 Derechos reservados por el editor de la revista
Derechos reservados por el editor de la revista
Exportado de SIDERAL (2024-01-11-09:29:46)
Visitas y descargas
Idioma: Inglés
DOI: 10.23919/ICCAS52745.2021.9650027
Año: 2021
Publicado en: International Conference on Control, Automation and Systems 21 (2021)
ISSN: 1598-7833
Tipo y forma: Comunicación congreso (PostPrint)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
Exportado de SIDERAL (2024-01-11-09:29:46)
Enlace permanente:
Visitas y descargas
Este artículo se encuentra en las siguientes colecciones:
Artículos > Artículos por área > Máster Universitario en Ingeniería de Sistemas y Automática
Registro creado el 2024-01-11, última modificación el 2024-01-11