DynaSLAM: Tracking, Mapping and Inpainting in Dynamic Scenes
Bescós, Berta (Universidad de Zaragoza) ; Fácil, José María (Universidad de Zaragoza) ; Civera, Javier (Universidad de Zaragoza) ; Neira, José (Universidad de Zaragoza)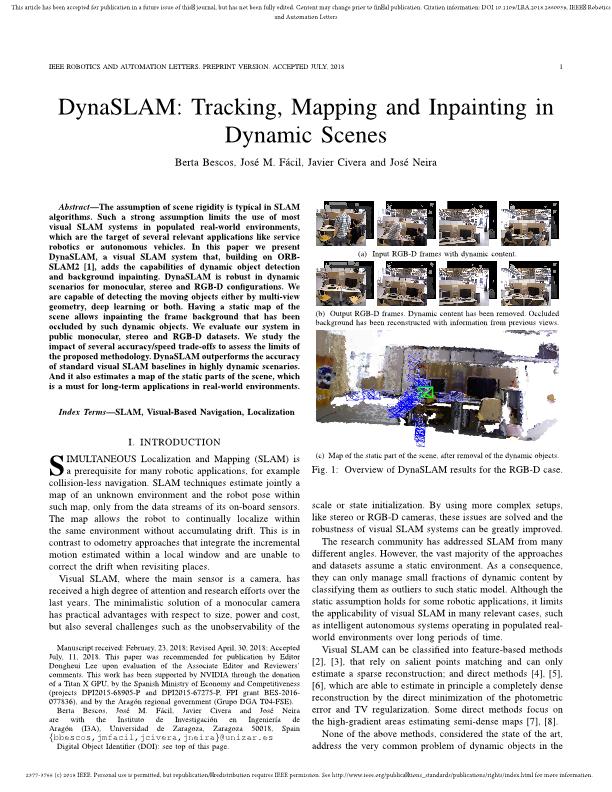
Resumen: The assumption of scene rigidity is typical in SLAM algorithms. Such a strong assumption limits the use of most visual SLAM systems in populated real-world environments, which are the target of several relevant applications like service robotics or autonomous vehicles. In this paper we present DynaSLAM, a visual SLAM system that, building on ORB- SLAM2 [1], adds the capabilities of dynamic object detection and background inpainting. DynaSLAM is robust in dynamic scenarios for monocular, stereo and RGB-D configurations. We are capable of detecting the moving objects either by multi-view geometry, deep learning or both. Having a static map of the scene allows inpainting the frame background that has been occluded by such dynamic objects. We evaluate our system in public monocular, stereo and RGB-D datasets. We study the impact of several accuracy/speed trade-offs to assess the limits of the proposed methodology. DynaSLAM outperforms the accuracy of standard visual SLAM baselines in highly dynamic scenarios. And it also estimates a map of the static parts of the scene, which is a must for long-term applications in real-world environments
Idioma: Inglés
DOI: 10.1109/LRA.2018.2860039
Año: 2018
Publicado en: IEEE ROBOTICS AND AUTOMATION LETTERS 3, 4 (2018), 4076 - 4083
ISSN: 2377-3766
Financiación: info:eu-repo/grantAgreement/ES/DGA/T04
Financiación: info:eu-repo/grantAgreement/ES/MINECO/BES-2016-077836
Financiación: info:eu-repo/grantAgreement/ES/MINECO/DPI2015-67275
Financiación: info:eu-repo/grantAgreement/ES/MINECO/DPI2015-68905-P
Tipo y forma: Article (Published version)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
Área (Departamento): Área Lenguajes y Sistemas Inf. (Dpto. Informát.Ingenie.Sistms.)
 You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use.
You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use.
Exportado de SIDERAL (2019-09-02-09:52:29)
Visitas y descargas
Idioma: Inglés
DOI: 10.1109/LRA.2018.2860039
Año: 2018
Publicado en: IEEE ROBOTICS AND AUTOMATION LETTERS 3, 4 (2018), 4076 - 4083
ISSN: 2377-3766
Financiación: info:eu-repo/grantAgreement/ES/DGA/T04
Financiación: info:eu-repo/grantAgreement/ES/MINECO/BES-2016-077836
Financiación: info:eu-repo/grantAgreement/ES/MINECO/DPI2015-67275
Financiación: info:eu-repo/grantAgreement/ES/MINECO/DPI2015-68905-P
Tipo y forma: Article (Published version)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
Área (Departamento): Área Lenguajes y Sistemas Inf. (Dpto. Informát.Ingenie.Sistms.)
Exportado de SIDERAL (2019-09-02-09:52:29)
Permalink:
Visitas y descargas
Este artículo se encuentra en las siguientes colecciones:
Articles
Record created 2018-08-16, last modified 2019-09-02