Semantic Segmentation from Sparse Labeling Using Multi-Level Superpixels
Alonso Ruiz, Iñigo (Universidad de Zaragoza) ; Murillo Arnal, Ana Cristina (Universidad de Zaragoza)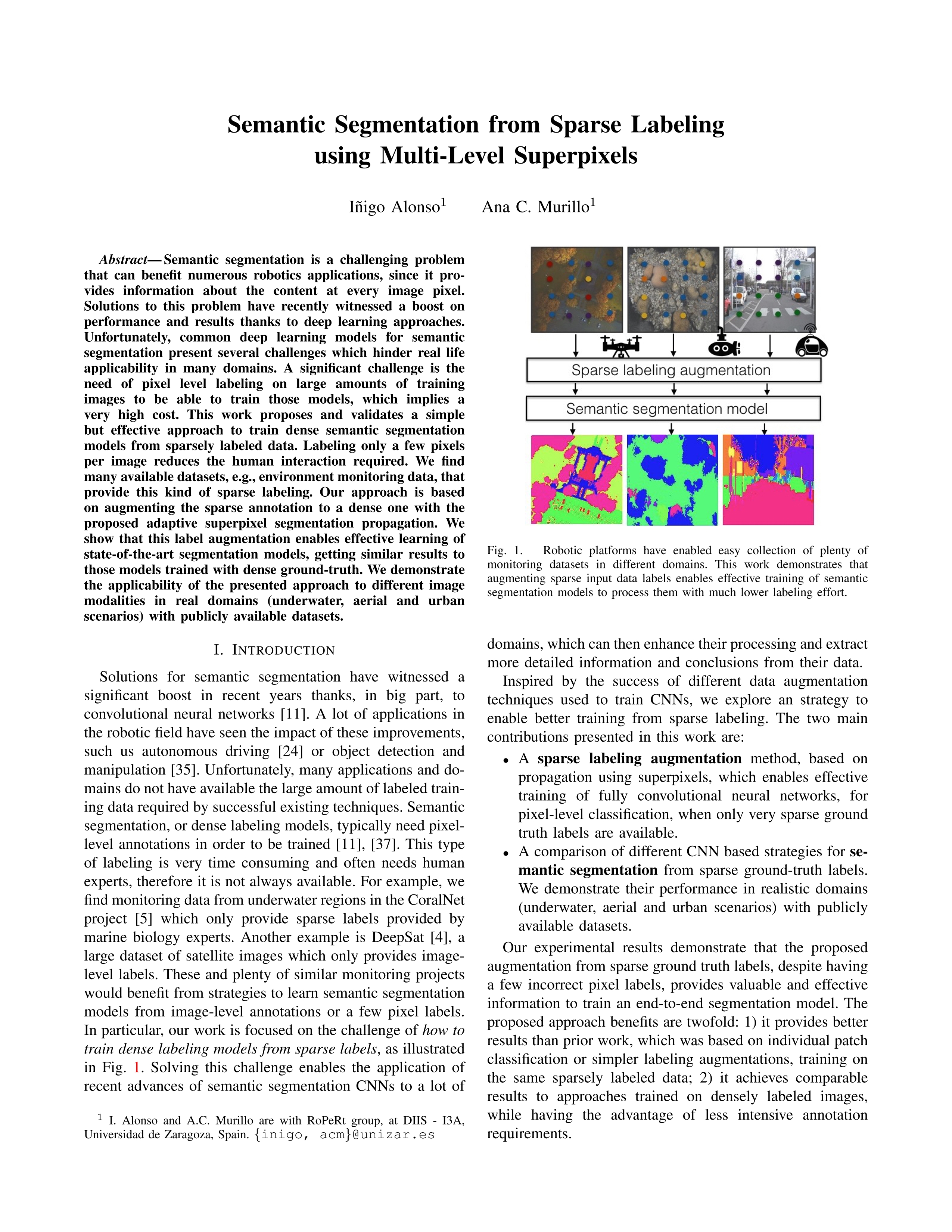
Resumen: Semantic segmentation is a challenging problemthat can benefit numerous robotics applications, since it pro-vides information about the content at every image pixel.Solutions to this problem have recently witnessed a boost onperformance and results thanks to deep learning approaches.Unfortunately, common deep learning models for semanticsegmentation present several challenges which hinder real lifeapplicability in many domains. A significant challenge is theneed of pixel level labeling on large amounts of trainingimages to be able to train those models, which implies avery high cost. This work proposes and validates a simplebut effective approach to train dense semantic segmentationmodels from sparsely labeled data. Labeling only a few pixelsper image reduces the human interaction required. We findmany available datasets, e.g., environment monitoring data, thatprovide this kind of sparse labeling. Our approach is basedon augmenting the sparse annotation to a dense one with theproposed adaptive superpixel segmentation propagation. Weshow that this label augmentation enables effective learning ofstate-of-the-art segmentation models, getting similar results tothose models trained with dense ground-truth.
Idioma: Inglés
DOI: 10.1109/IROS.2018.8594185
Año: 2018
Publicado en: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems 2018, 18401073 (2018), 5785-5792
ISSN: 2153-0858
Financiación: info:eu-repo/grantAgreement/ES/DGA/T45-17R
Financiación: info:eu-repo/grantAgreement/ES/MINECO-FEDER/DPI2015-69376-R
Financiación: info:eu-repo/grantAgreement/ES/UZ/UZ2017-TEC-06
Tipo y forma: Article (PostPrint)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
 You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use.
You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use.
Exportado de SIDERAL (2021-05-07-08:04:19)
Visitas y descargas
Idioma: Inglés
DOI: 10.1109/IROS.2018.8594185
Año: 2018
Publicado en: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems 2018, 18401073 (2018), 5785-5792
ISSN: 2153-0858
Financiación: info:eu-repo/grantAgreement/ES/DGA/T45-17R
Financiación: info:eu-repo/grantAgreement/ES/MINECO-FEDER/DPI2015-69376-R
Financiación: info:eu-repo/grantAgreement/ES/UZ/UZ2017-TEC-06
Tipo y forma: Article (PostPrint)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
Exportado de SIDERAL (2021-05-07-08:04:19)
Permalink:
Visitas y descargas
Este artículo se encuentra en las siguientes colecciones:
Articles > Artículos por área > Ingeniería de Sistemas y Automática
Record created 2021-05-07, last modified 2021-05-07