Multirobot control with double-integrator dynamics and control barrier functions for deformable object transport
Herguedas, Rafael (Universidad de Zaragoza) ; Aranda, Miguel ; Lopez-Nicolas, Gonzalo (Universidad de Zaragoza) ; Sagües, Carlos (Universidad de Zaragoza) ; Mezouar, Youcef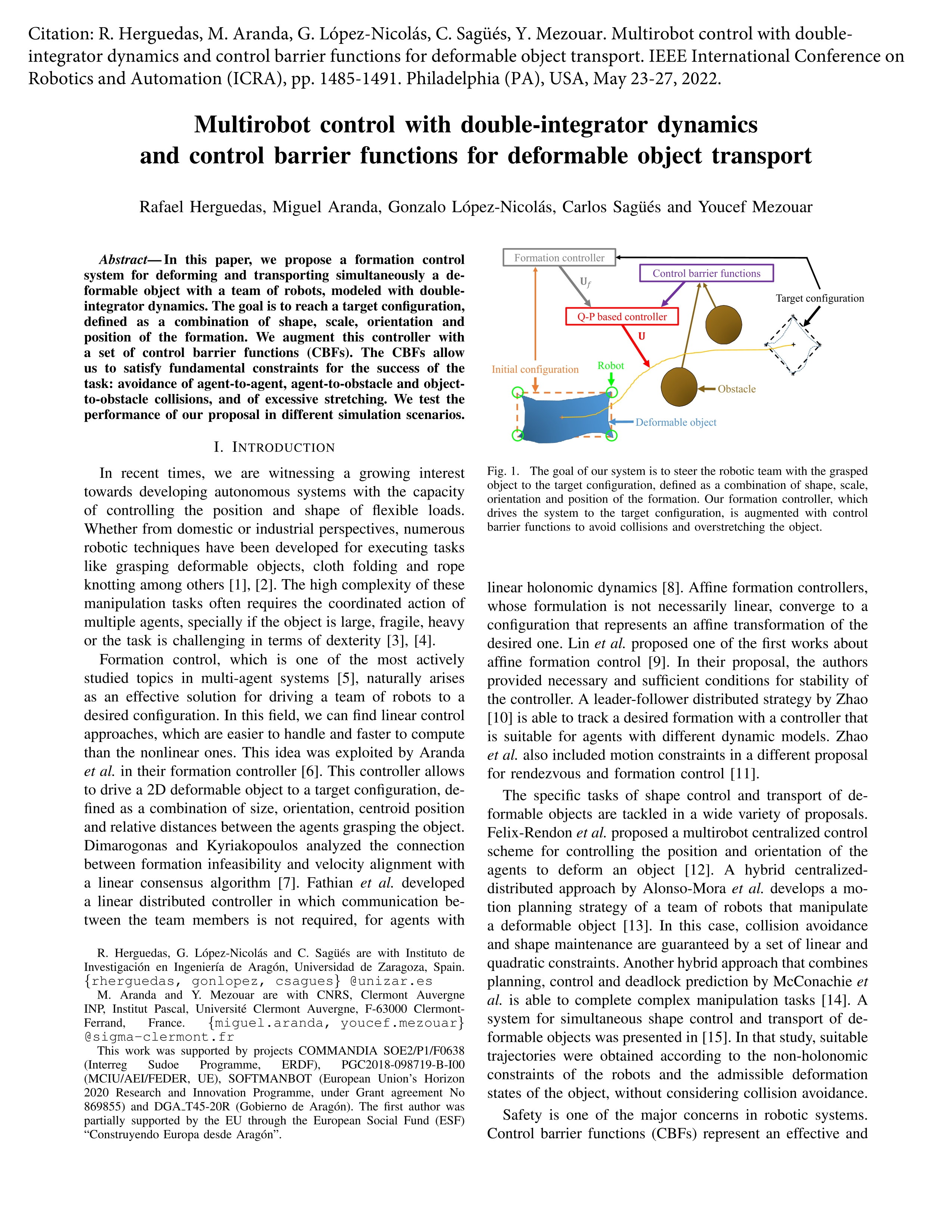
Resumen: In this paper, we propose a formation control system for deforming and transporting simultaneously a de-formable object with a team of robots, modeled with double-integrator dynamics. The goal is to reach a target configuration, defined as a combination of shape, scale, orientation and position of the formation. We augment this controller with a set of control barrier functions (CBFs). The CBFs allow us to satisfy fundamental constraints for the success of the task: avoidance of agent-to-agent, agent-to-obstacle and object-to-obstacle collisions, and of excessive stretching. We test the performance of our proposal in different simulation scenarios.
Idioma: Inglés
DOI: 10.1109/ICRA46639.2022.9812378
Año: 2022
Publicado en: IEEE International Conference on Robotics and Automation 2022 (2022), 1485-1491
ISSN: 2152-4092
Financiación: info:eu-repo/grantAgreement/ES/DGA-FSE/T45-20R
Financiación: info:eu-repo/grantAgreement/EC/H2020/869855/EU/Advanced RoBOTic Technology for Handling SOFT Materials in MANufacturing Sectors/SOFTMANBOT
Financiación: info:eu-repo/grantAgreement/ES/MCIU-AEI-FEDER/PGC2018-098719-B-I00
Financiación: info:eu-repo/grantAgreement/EUR/SUDOE/INTERREG/COMMANDIA-SOE2-P1-F0638
Tipo y forma: Comunicación congreso (PostPrint)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
 Derechos reservados por el editor de la revista
Derechos reservados por el editor de la revista
Exportado de SIDERAL (2024-01-12-14:09:28)
Visitas y descargas
Idioma: Inglés
DOI: 10.1109/ICRA46639.2022.9812378
Año: 2022
Publicado en: IEEE International Conference on Robotics and Automation 2022 (2022), 1485-1491
ISSN: 2152-4092
Financiación: info:eu-repo/grantAgreement/ES/DGA-FSE/T45-20R
Financiación: info:eu-repo/grantAgreement/EC/H2020/869855/EU/Advanced RoBOTic Technology for Handling SOFT Materials in MANufacturing Sectors/SOFTMANBOT
Financiación: info:eu-repo/grantAgreement/ES/MCIU-AEI-FEDER/PGC2018-098719-B-I00
Financiación: info:eu-repo/grantAgreement/EUR/SUDOE/INTERREG/COMMANDIA-SOE2-P1-F0638
Tipo y forma: Comunicación congreso (PostPrint)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
Exportado de SIDERAL (2024-01-12-14:09:28)
Enlace permanente:
Visitas y descargas
Este artículo se encuentra en las siguientes colecciones:
Artículos > Artículos por área > Máster Universitario en Ingeniería de Sistemas y Automática
Registro creado el 2024-01-12, última modificación el 2024-01-12