3D-MiniNet: Learning a 2D Representation from Point Clouds for Fast and Efficient 3D LIDAR Semantic Segmentation
Alonso, I. (Universidad de Zaragoza) ; Riazuelo, L. (Universidad de Zaragoza) ; Montesano, L. (Universidad de Zaragoza) ; Murillo, A.C. (Universidad de Zaragoza)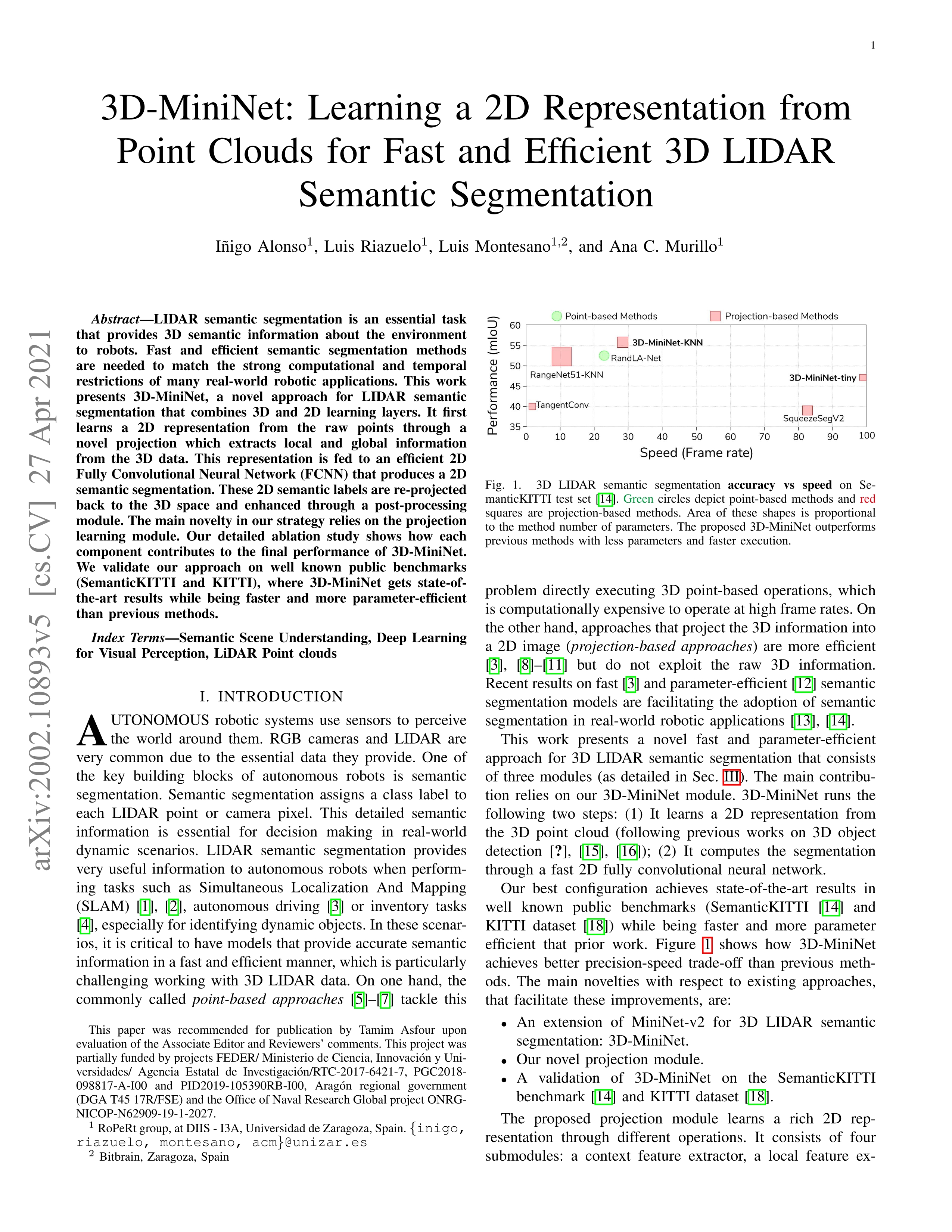
Resumen: LIDAR semantic segmentation is an essential task that provides 3D semantic information about the environment to robots. Fast and efficient semantic segmentation methods are needed to match the strong computational and temporal restrictions of many real-world robotic applications. This work presents 3D-MiniNet, a novel approach for LIDAR semantic segmentation that combines 3D and 2D learning layers. It first learns a 2D representation from the raw points through a novel projection which extracts local and global information from the 3D data. This representation is fed to an efficient 2D Fully Convolutional Neural Network (FCNN) that produces a 2D semantic segmentation. These 2D semantic labels are re-projected back to the 3D space and enhanced through a post-processing module. The main novelty in our strategy relies on the projection learning module. Our detailed ablation study shows how each component contributes to the final performance of 3D-MiniNet. We validate our approach on well known public benchmarks (SemanticKITTI and KITTI), where 3D-MiniNet gets state-of-the-art results while being faster and more parameter-efficient than previous methods.
Idioma: Inglés
DOI: 10.1109/LRA.2020.3007440
Año: 2020
Publicado en: IEEE Robotics and Automation Letters 5, 4 (2020), 5432-5439
ISSN: 2377-3766
Factor impacto JCR: 3.741 (2020)
Categ. JCR: ROBOTICS rank: 9 / 28 = 0.321 (2020) - Q2 - T1
Factor impacto SCIMAGO: 1.123 - Artificial Intelligence (Q1) - Biomedical Engineering (Q1) - Computer Science Applications (Q1) - Mechanical Engineering (Q1) - Control and Optimization (Q1) - Control and Systems Engineering (Q1) - Human-Computer Interaction (Q1) - Computer Vision and Pattern Recognition (Q1)
Financiación: info:eu-repo/grantAgreement/ES/DGA-FSE/T45-17R
Financiación: info:eu-repo/grantAgreement/ES/MCIU-AEI/RTC-2017-6421-7
Financiación: info:eu-repo/grantAgreement/ES/MICIU-AEI-FEDER/PGC2018-098817-A-I00
Financiación: info:eu-repo/grantAgreement/ES/MICIU/PID2019-105390RB-I00
Tipo y forma: Artículo (PostPrint)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
Área (Departamento): Área Lenguajes y Sistemas Inf. (Dpto. Informát.Ingenie.Sistms.)
 Derechos reservados por el editor de la revista
Derechos reservados por el editor de la revista
Exportado de SIDERAL (2025-10-17-14:14:33)
Visitas y descargas
Idioma: Inglés
DOI: 10.1109/LRA.2020.3007440
Año: 2020
Publicado en: IEEE Robotics and Automation Letters 5, 4 (2020), 5432-5439
ISSN: 2377-3766
Factor impacto JCR: 3.741 (2020)
Categ. JCR: ROBOTICS rank: 9 / 28 = 0.321 (2020) - Q2 - T1
Factor impacto SCIMAGO: 1.123 - Artificial Intelligence (Q1) - Biomedical Engineering (Q1) - Computer Science Applications (Q1) - Mechanical Engineering (Q1) - Control and Optimization (Q1) - Control and Systems Engineering (Q1) - Human-Computer Interaction (Q1) - Computer Vision and Pattern Recognition (Q1)
Financiación: info:eu-repo/grantAgreement/ES/DGA-FSE/T45-17R
Financiación: info:eu-repo/grantAgreement/ES/MCIU-AEI/RTC-2017-6421-7
Financiación: info:eu-repo/grantAgreement/ES/MICIU-AEI-FEDER/PGC2018-098817-A-I00
Financiación: info:eu-repo/grantAgreement/ES/MICIU/PID2019-105390RB-I00
Tipo y forma: Artículo (PostPrint)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
Área (Departamento): Área Lenguajes y Sistemas Inf. (Dpto. Informát.Ingenie.Sistms.)
Exportado de SIDERAL (2025-10-17-14:14:33)
Enlace permanente:
Visitas y descargas
Este artículo se encuentra en las siguientes colecciones:
Artículos > Artículos por área > Máster Universitario en Ingeniería de Sistemas y Automática
Artículos > Artículos por área > Lenguajes y Sistemas Informáticos
Registro creado el 2025-02-01, última modificación el 2025-10-17