Towards Map-Agnostic Policies for Adaptive Informative Path Planning
Rückin, Julius ; Morilla-Cabello, David (Universidad de Zaragoza) ; Stachniss, Cyrill ; Montijano, Eduardo (Universidad de Zaragoza) ; Popovic, Marija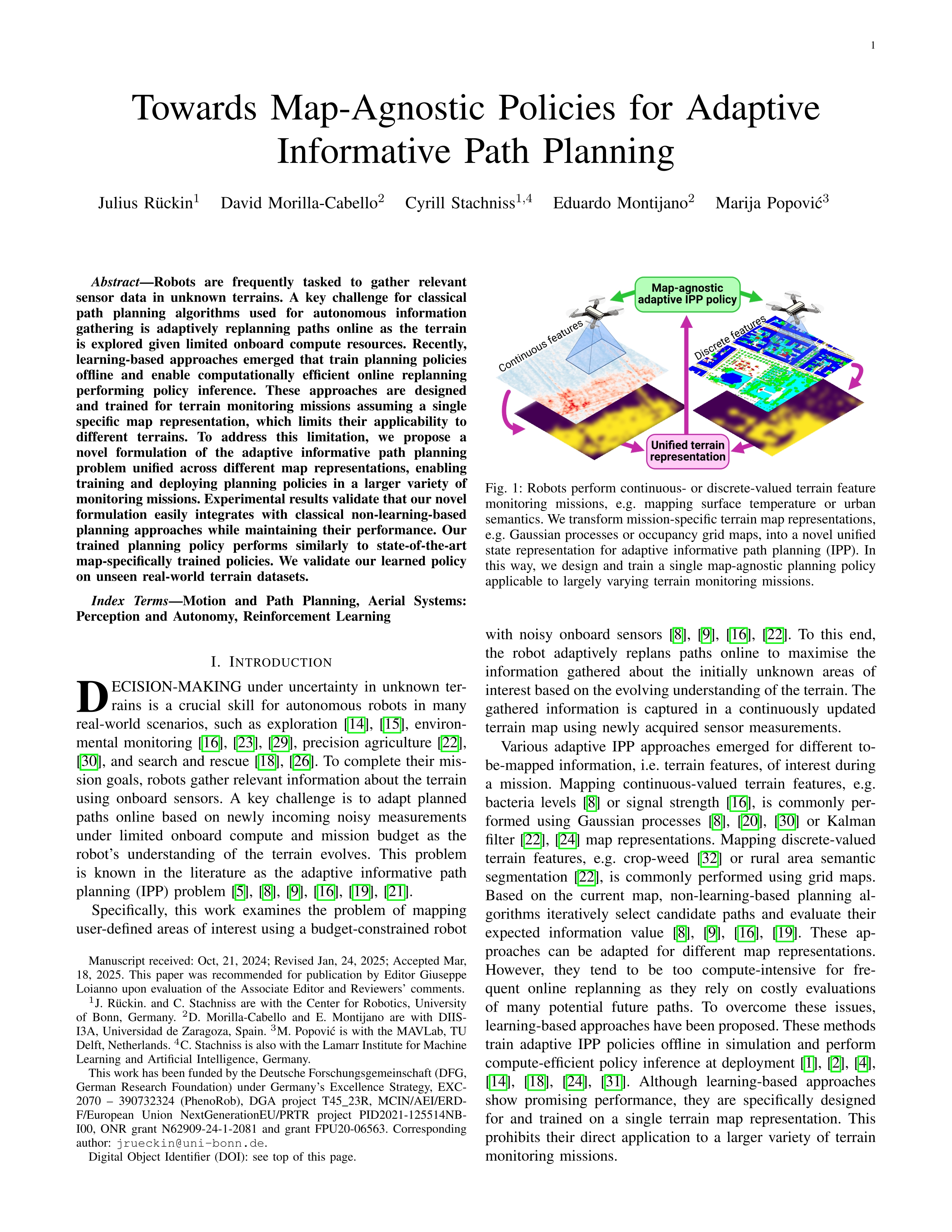
Resumen: Robots are frequently tasked to gather relevant sensor data in unknown terrains. A key challenge for classical path planning algorithms used for autonomous information gathering is adaptively replanning paths online as the terrain is explored given limited onboard compute resources. Recently, learning-based approaches emerged that train planning policies offline and enable computationally efficient online replanning performing policy inference. These approaches are designed and trained for terrain monitoring missions assuming a single specific map representation, which limits their applicability to different terrains. To address this limitation, we propose a novel formulation of the adaptive informative path planning problem unified across different map representations, enabling training and deploying planning policies in a larger variety of monitoring missions. Experimental results validate that our novel formulation easily integrates with classical non-learning-based planning approaches while maintaining their performance. Our trained planning policy performs similarly to state-of-the-art map-specifically trained policies. We validate our learned policy on unseen real-world terrain datasets.
Idioma: Inglés
DOI: 10.1109/LRA.2025.3557233
Año: 2025
Publicado en: IEEE Robotics and Automation Letters 10, 5 (2025), 5114-5121
ISSN: 2377-3766
Tipo y forma: Article (PostPrint)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
 All rights reserved by journal editor
All rights reserved by journal editor
Exportado de SIDERAL (2026-02-10-08:35:34)
Visitas y descargas
Idioma: Inglés
DOI: 10.1109/LRA.2025.3557233
Año: 2025
Publicado en: IEEE Robotics and Automation Letters 10, 5 (2025), 5114-5121
ISSN: 2377-3766
Tipo y forma: Article (PostPrint)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
Exportado de SIDERAL (2026-02-10-08:35:34)
Permalink:
Visitas y descargas
Este artículo se encuentra en las siguientes colecciones:
Articles > Artículos por área > Ingeniería de Sistemas y Automática
Record created 2026-01-28, last modified 2026-02-10