DynaSLAM: Tracking, Mapping and Inpainting in Dynamic Scenes
Bescós, Berta (Universidad de Zaragoza) ; Fácil, José María (Universidad de Zaragoza) ; Civera, Javier (Universidad de Zaragoza) ; Neira, José (Universidad de Zaragoza)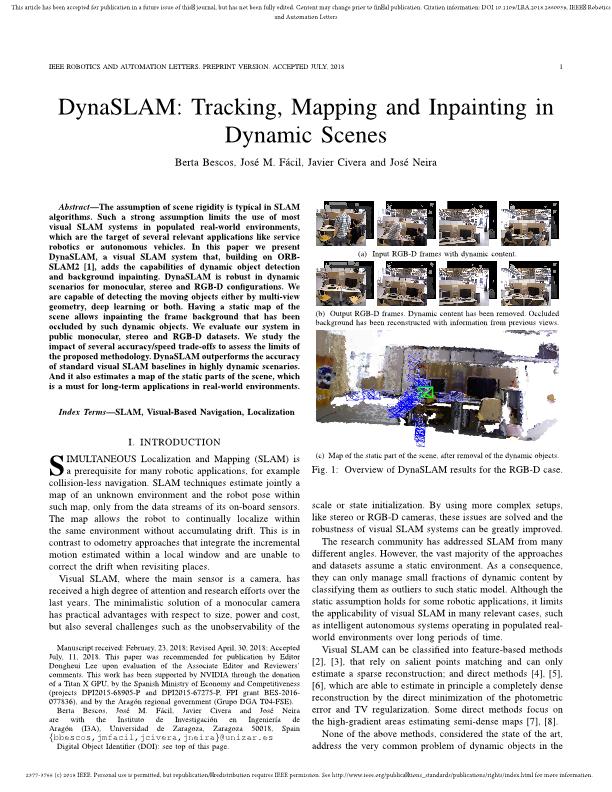
Resumen: The assumption of scene rigidity is typical in SLAM algorithms. Such a strong assumption limits the use of most visual SLAM systems in populated real-world environments, which are the target of several relevant applications like service robotics or autonomous vehicles. In this paper we present DynaSLAM, a visual SLAM system that, building on ORB- SLAM2 [1], adds the capabilities of dynamic object detection and background inpainting. DynaSLAM is robust in dynamic scenarios for monocular, stereo and RGB-D configurations. We are capable of detecting the moving objects either by multi-view geometry, deep learning or both. Having a static map of the scene allows inpainting the frame background that has been occluded by such dynamic objects. We evaluate our system in public monocular, stereo and RGB-D datasets. We study the impact of several accuracy/speed trade-offs to assess the limits of the proposed methodology. DynaSLAM outperforms the accuracy of standard visual SLAM baselines in highly dynamic scenarios. And it also estimates a map of the static parts of the scene, which is a must for long-term applications in real-world environments
Idioma: Inglés
DOI: 10.1109/LRA.2018.2860039
Año: 2018
Publicado en: IEEE ROBOTICS AND AUTOMATION LETTERS 3, 4 (2018), 4076 - 4083
ISSN: 2377-3766
Financiación: info:eu-repo/grantAgreement/ES/DGA/T04
Financiación: info:eu-repo/grantAgreement/ES/MINECO/BES-2016-077836
Financiación: info:eu-repo/grantAgreement/ES/MINECO/DPI2015-67275
Financiación: info:eu-repo/grantAgreement/ES/MINECO/DPI2015-68905-P
Tipo y forma: Artículo (Versión definitiva)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
Área (Departamento): Área Lenguajes y Sistemas Inf. (Dpto. Informát.Ingenie.Sistms.)
 Debe reconocer adecuadamente la autoría, proporcionar un enlace a la licencia e indicar si se han realizado cambios. Puede hacerlo de cualquier manera razonable, pero no de una manera que sugiera que tiene el apoyo del licenciador o lo recibe por el uso que hace.
Debe reconocer adecuadamente la autoría, proporcionar un enlace a la licencia e indicar si se han realizado cambios. Puede hacerlo de cualquier manera razonable, pero no de una manera que sugiera que tiene el apoyo del licenciador o lo recibe por el uso que hace.
Exportado de SIDERAL (2019-09-02-09:52:29)
Visitas y descargas
Idioma: Inglés
DOI: 10.1109/LRA.2018.2860039
Año: 2018
Publicado en: IEEE ROBOTICS AND AUTOMATION LETTERS 3, 4 (2018), 4076 - 4083
ISSN: 2377-3766
Financiación: info:eu-repo/grantAgreement/ES/DGA/T04
Financiación: info:eu-repo/grantAgreement/ES/MINECO/BES-2016-077836
Financiación: info:eu-repo/grantAgreement/ES/MINECO/DPI2015-67275
Financiación: info:eu-repo/grantAgreement/ES/MINECO/DPI2015-68905-P
Tipo y forma: Artículo (Versión definitiva)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
Área (Departamento): Área Lenguajes y Sistemas Inf. (Dpto. Informát.Ingenie.Sistms.)
Exportado de SIDERAL (2019-09-02-09:52:29)
Enlace permanente:
Visitas y descargas
Este artículo se encuentra en las siguientes colecciones:
Artículos > Artículos por área > Máster Universitario en Ingeniería de Sistemas y Automática
Artículos > Artículos por área > Lenguajes y Sistemas Informáticos
Registro creado el 2018-08-16, última modificación el 2019-09-02