Loosely-Coupled Semi-Direct Monocular SLAM
Lee, S.H. (Universidad de Zaragoza) ; Civera, J. (Universidad de Zaragoza)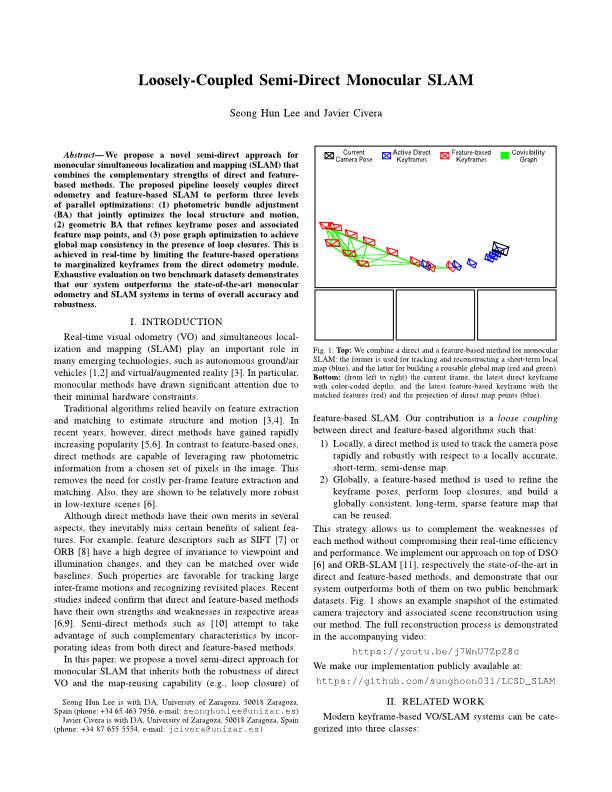
Resumen: We propose a novel semi-direct approach for monocular simultaneous localization and mapping (SLAM) that combines the complementary strengths of direct and feature-based methods. The proposed pipeline loosely couples direct odometry and feature-based SLAM to perform three levels of parallel optimizations: 1) photometric bundle adjustment (BA) that jointly optimizes the local structure and motion, 2) geometric BA that refines keyframe poses and associated feature map points, and 3) pose graph optimization to achieve global map consistency in the presence of loop closures. This is achieved in real-time by limiting the feature-based operations to marginalized keyframes from the direct odometry module. Exhaustive evaluation on two benchmark datasets demonstrates that our system outperforms the state-of-the-art monocular odometry and SLAM systems in terms of overall accuracy and robustness.
Idioma: Inglés
DOI: 10.1109/LRA.2018.2889156Y
Año: 2019
Publicado en: IEEE ROBOTICS AND AUTOMATION LETTERS 4, 2 (2019), 399-406
ISSN: 2377-3766
Factor impacto JCR: 3.608 (2019)
Categ. JCR: ROBOTICS rank: 6 / 28 = 0.214 (2019) - Q1 - T1
Factor impacto SCIMAGO: 1.555 - Artificial Intelligence (Q1) - Biomedical Engineering (Q1) - Computer Science Applications (Q1) - Mechanical Engineering (Q1) - Control and Optimization (Q1) - Control and Systems Engineering (Q1) - Human-Computer Interaction (Q1) - Computer Vision and Pattern Recognition (Q1)
Tipo y forma: Artículo (PostPrint)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
 Derechos reservados por el editor de la revista
Derechos reservados por el editor de la revista
Exportado de SIDERAL (2021-02-23-08:20:43)
Visitas y descargas
Idioma: Inglés
DOI: 10.1109/LRA.2018.2889156Y
Año: 2019
Publicado en: IEEE ROBOTICS AND AUTOMATION LETTERS 4, 2 (2019), 399-406
ISSN: 2377-3766
Factor impacto JCR: 3.608 (2019)
Categ. JCR: ROBOTICS rank: 6 / 28 = 0.214 (2019) - Q1 - T1
Factor impacto SCIMAGO: 1.555 - Artificial Intelligence (Q1) - Biomedical Engineering (Q1) - Computer Science Applications (Q1) - Mechanical Engineering (Q1) - Control and Optimization (Q1) - Control and Systems Engineering (Q1) - Human-Computer Interaction (Q1) - Computer Vision and Pattern Recognition (Q1)
Tipo y forma: Artículo (PostPrint)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
Exportado de SIDERAL (2021-02-23-08:20:43)
Enlace permanente:
Visitas y descargas
Este artículo se encuentra en las siguientes colecciones:
Artículos > Artículos por área > Máster Universitario en Ingeniería de Sistemas y Automática
Registro creado el 2019-04-12, última modificación el 2021-02-23