Combined leaderless control of translational, shape-preserving, and affine multirobot formations
Aranda, Miguel (Universidad de Zaragoza) ; Aragüés, Rosario (Universidad de Zaragoza) ; López-Nicolás, Gonzalo (Universidad de Zaragoza)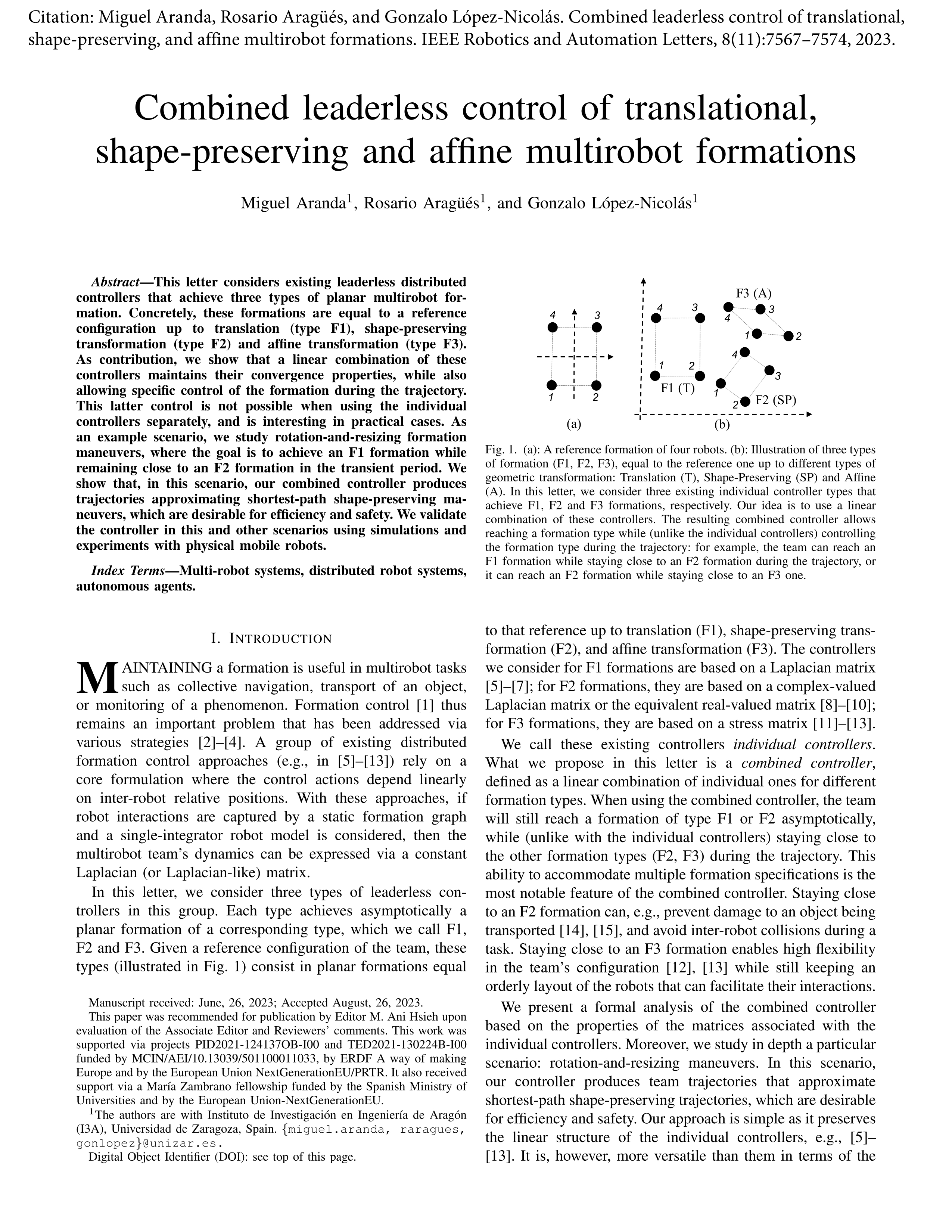
Resumen: This letter considers existing leaderless distributed controllers that achieve three types of planar multirobot formation. Concretely, these formations are equal to a reference configuration up to translation (type F1), shape-preserving transformation (type F2), and affine transformation (type F3). As contribution, we show that a linear combination of these controllers maintains their convergence properties, while also allowing specific control of the formation during the trajectory. This latter control is not possible when using the individual controllers separately, and is interesting in practical cases. As an example scenario, we study rotation-and-resizing formation maneuvers, where the goal is to achieve an F1 formation while remaining close to an F2 formation in the transient period. We show that, in this scenario, our combined controller produces trajectories approximating shortest-path shape-preserving maneuvers, which are desirable for efficiency and safety. We validate the controller in this and other scenarios using simulations and experiments with physical mobile robots.
Idioma: Inglés
DOI: 10.1109/LRA.2023.3316889
Año: 2023
Publicado en: IEEE Robotics and Automation Letters 8, 11 (2023), 7567-7574
ISSN: 2377-3766
Factor impacto JCR: 4.6 (2023)
Categ. JCR: ROBOTICS rank: 12 / 46 = 0.261 (2023) - Q2 - T1
Factor impacto CITESCORE: 9.6 - Computer Science Applications (Q1) - Control and Systems Engineering (Q1) - Artificial Intelligence (Q1) - Mechanical Engineering (Q1) - Biomedical Engineering (Q1) - Computer Vision and Pattern Recognition (Q1) - Human-Computer Interaction (Q1) - Control and Optimization (Q1)
Factor impacto SCIMAGO: 2.119 - Artificial Intelligence (Q1) - Biomedical Engineering (Q1) - Computer Science Applications (Q1) - Mechanical Engineering (Q1) - Control and Optimization (Q1) - Control and Systems Engineering (Q1) - Human-Computer Interaction (Q1) - Computer Vision and Pattern Recognition (Q1)
Financiación: info:eu-repo/grantAgreement/EUR/AEI/TED2021-130224B-I00
Financiación: info:eu-repo/grantAgreement/ES/MICINN-AEI-FEDER/PID2021-124137OB-I00
Tipo y forma: Article (PostPrint)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
Exportado de SIDERAL (2024-11-22-11:56:58)
Visitas y descargas
Idioma: Inglés
DOI: 10.1109/LRA.2023.3316889
Año: 2023
Publicado en: IEEE Robotics and Automation Letters 8, 11 (2023), 7567-7574
ISSN: 2377-3766
Factor impacto JCR: 4.6 (2023)
Categ. JCR: ROBOTICS rank: 12 / 46 = 0.261 (2023) - Q2 - T1
Factor impacto CITESCORE: 9.6 - Computer Science Applications (Q1) - Control and Systems Engineering (Q1) - Artificial Intelligence (Q1) - Mechanical Engineering (Q1) - Biomedical Engineering (Q1) - Computer Vision and Pattern Recognition (Q1) - Human-Computer Interaction (Q1) - Control and Optimization (Q1)
Factor impacto SCIMAGO: 2.119 - Artificial Intelligence (Q1) - Biomedical Engineering (Q1) - Computer Science Applications (Q1) - Mechanical Engineering (Q1) - Control and Optimization (Q1) - Control and Systems Engineering (Q1) - Human-Computer Interaction (Q1) - Computer Vision and Pattern Recognition (Q1)
Financiación: info:eu-repo/grantAgreement/EUR/AEI/TED2021-130224B-I00
Financiación: info:eu-repo/grantAgreement/ES/MICINN-AEI-FEDER/PID2021-124137OB-I00
Tipo y forma: Article (PostPrint)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
Exportado de SIDERAL (2024-11-22-11:56:58)
Permalink:
Visitas y descargas
Este artículo se encuentra en las siguientes colecciones:
articulos > articulos-por-area > ingenieria_de_sistemas_y_automatica
Notice créée le 2024-01-22, modifiée le 2024-11-25