CineMPC: A Fully Autonomous Drone Cinematography System Incorporating Zoom, Focus, Pose, and Scene Composition
Pueyo, Pablo (Universidad de Zaragoza) ; Dendarieta, Juan (Universidad de Zaragoza) ; Montijano, Eduardo (Universidad de Zaragoza) ; Murillo, Ana Cristina (Universidad de Zaragoza) ; Schwager, Mac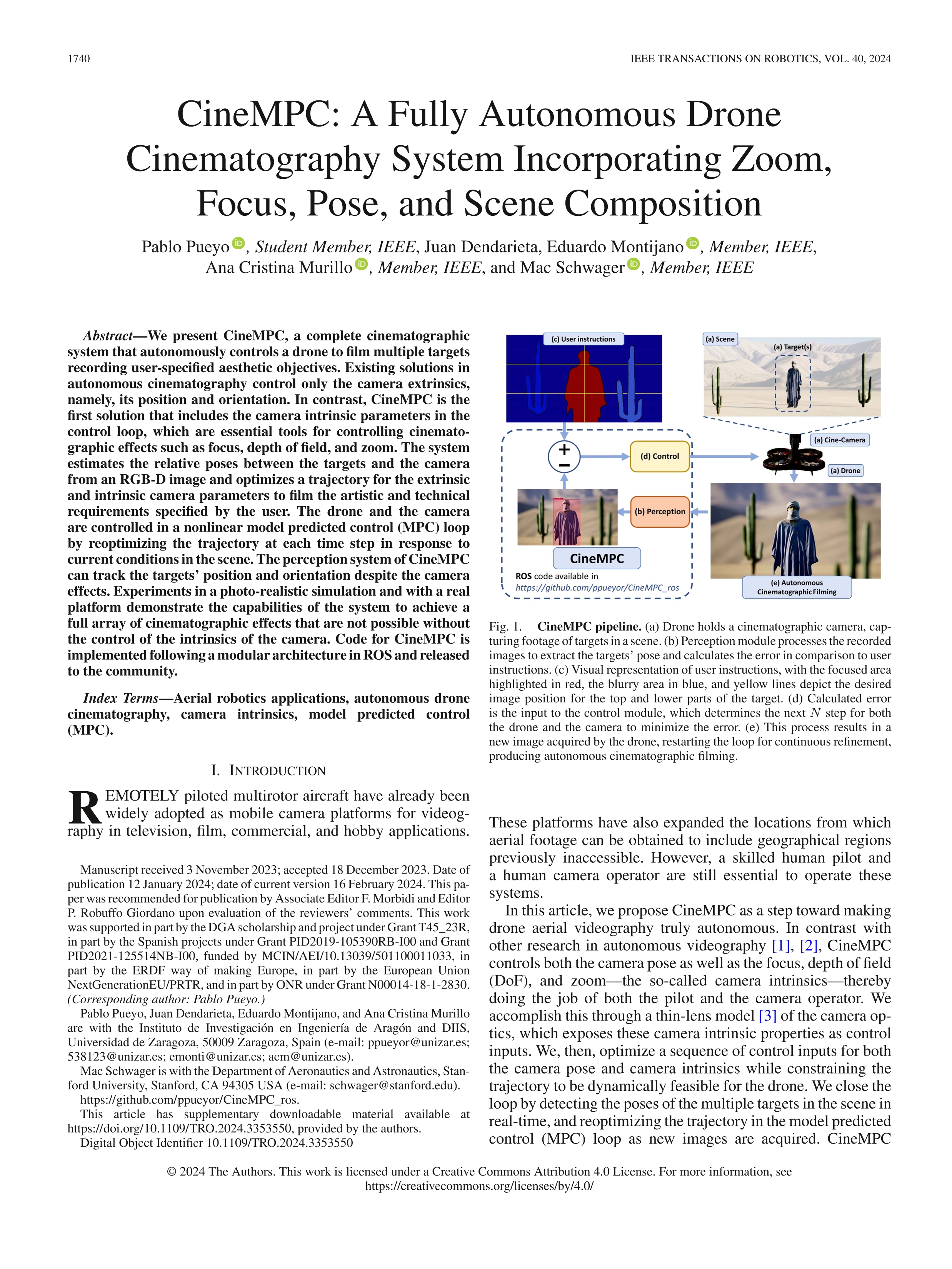
Resumen: We present CineMPC, a complete cinematographic system that autonomously controls a drone to film multiple targets recording user-specified aesthetic objectives. Existing solutions in autonomous cinematography control only the camera extrinsics, namely its position, and orientation. In contrast, CineMPC is the first solution that includes the camera intrinsic parameters in the control loop, which are essential tools for controlling cinematographic effects like focus, depth-of-field, and zoom. The system estimates the relative poses between the targets and the camera from an RGB-D image and optimizes a trajectory for the extrinsic and intrinsic camera parameters to film the artistic and technical requirements specified by the user. The drone and the camera are controlled in a nonlinear Model Predicted Control (MPC) loop by re-optimizing the trajectory at each time step in response to current conditions in the scene. The perception system of CineMPC can track the targets' position and orientation despite the camera effects. Experiments in a photo-realistic simulation and with a real platform demonstrate the capabilities of the system to achieve a full array of cinematographic effects that are not possible without the control of the intrinsics of the camera. Code for CineMPC is implemented following a modular architecture in ROS and released to the community IEEE
Idioma: Inglés
DOI: 10.1109/TRO.2024.3353550
Año: 2024
Publicado en: IEEE Transactions on Robotics 40 (2024), 1740-1757
ISSN: 1552-3098
Factor impacto JCR: 10.5 (2024)
Categ. JCR: ROBOTICS rank: 5 / 48 = 0.104 (2024) - Q1 - T1
Factor impacto CITESCORE: 19.3 - Electrical and Electronic Engineering (Q1) - Control and Systems Engineering (Q1) - Computer Science Applications (Q1)
Factor impacto SCIMAGO: 2.965 - Computer Science Applications (Q1) - Electrical and Electronic Engineering (Q1) - Control and Systems Engineering (Q1)
Tipo y forma: Artículo (Versión definitiva)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
 Debe reconocer adecuadamente la autoría, proporcionar un enlace a la licencia e indicar si se han realizado cambios. Puede hacerlo de cualquier manera razonable, pero no de una manera que sugiera que tiene el apoyo del licenciador o lo recibe por el uso que hace.
Debe reconocer adecuadamente la autoría, proporcionar un enlace a la licencia e indicar si se han realizado cambios. Puede hacerlo de cualquier manera razonable, pero no de una manera que sugiera que tiene el apoyo del licenciador o lo recibe por el uso que hace.
Exportado de SIDERAL (2026-02-17-20:20:04)
Visitas y descargas
Idioma: Inglés
DOI: 10.1109/TRO.2024.3353550
Año: 2024
Publicado en: IEEE Transactions on Robotics 40 (2024), 1740-1757
ISSN: 1552-3098
Factor impacto JCR: 10.5 (2024)
Categ. JCR: ROBOTICS rank: 5 / 48 = 0.104 (2024) - Q1 - T1
Factor impacto CITESCORE: 19.3 - Electrical and Electronic Engineering (Q1) - Control and Systems Engineering (Q1) - Computer Science Applications (Q1)
Factor impacto SCIMAGO: 2.965 - Computer Science Applications (Q1) - Electrical and Electronic Engineering (Q1) - Control and Systems Engineering (Q1)
Tipo y forma: Artículo (Versión definitiva)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
Exportado de SIDERAL (2026-02-17-20:20:04)
Enlace permanente:
Visitas y descargas
Este artículo se encuentra en las siguientes colecciones:
Artículos > Artículos por área > Máster Universitario en Ingeniería de Sistemas y Automática
Registro creado el 2024-03-01, última modificación el 2026-02-17