Corners for Layout: End-to-End Layout Recovery from 360 Images
Fernandez-Labrador, Clara ; Facil, José M. (Universidad de Zaragoza) ; Perez-Yus, Alejandro (Universidad de Zaragoza) ; Demonceaux, Cédric ; Civera, Javier (Universidad de Zaragoza) ; Guerrero, José J. (Universidad de Zaragoza)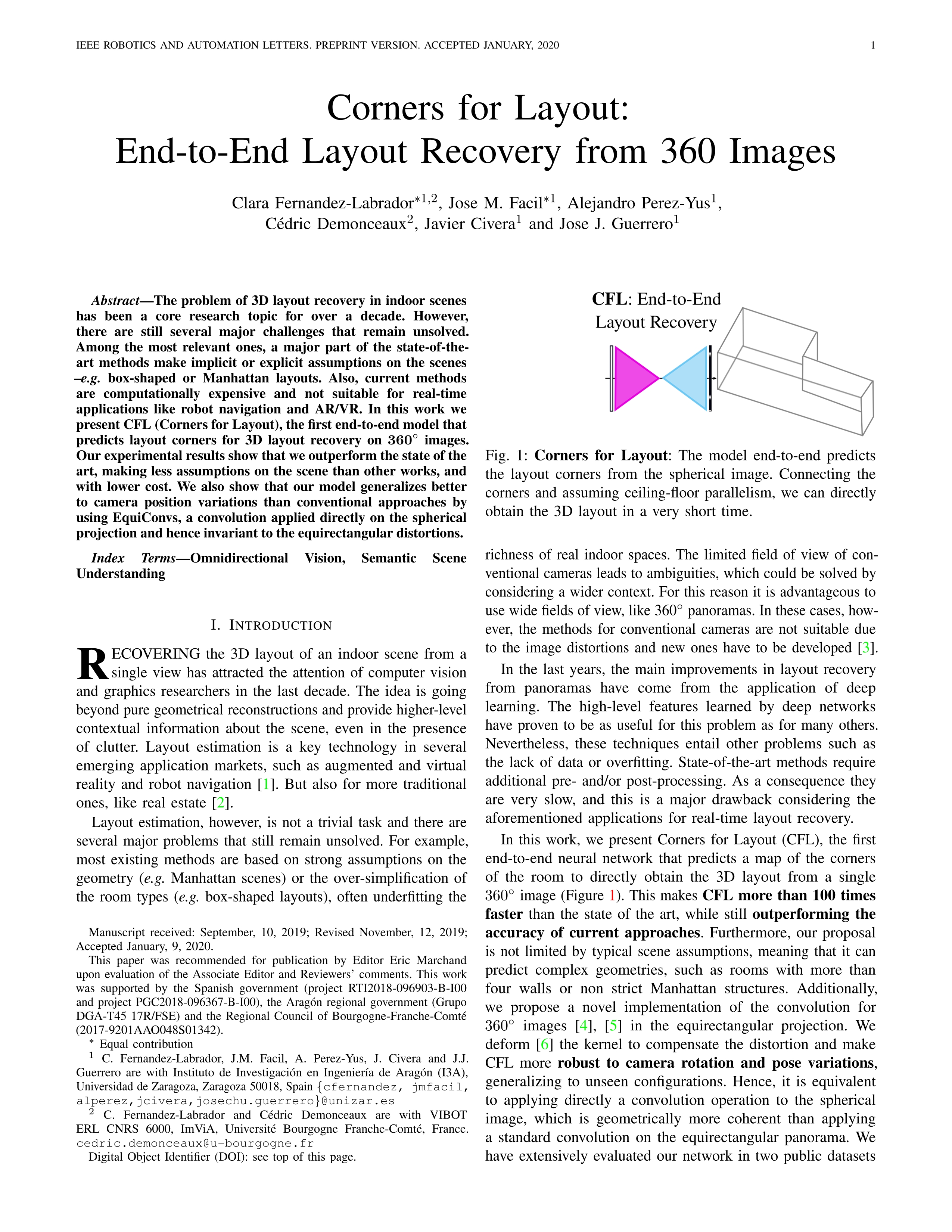
Resumen: The problem of 3D layout recovery in indoor scenes has been a core research topic for over a decade. However, there are still several major challenges that remain unsolved. Among the most relevant ones, a major part of the state-of-the-art methods make implicit or explicit assumptions on the scenes -e.g. box-shaped or Manhattan layouts. Also, current methods are computationally expensive and not suitable for real-time applications like robot navigation and AR/VR. In this work we present CFL (Corners for Layout), the first end-to-end model that predicts layout corners for 3D layout recovery on mathbf {{360}circ } images. Our experimental results show that we outperform the state of the art, making less assumptions on the scene than other works, and with lower cost. We also show that our model generalizes better to camera position variations than conventional approaches by using EquiConvs, a convolution applied directly on the spherical projection and hence invariant to the equirectangular distortions.
Idioma: Inglés
DOI: 10.1109/LRA.2020.2967274
Año: 2020
Publicado en: IEEE Robotics and Automation Letters 5, 2 (2020), 1255-1262
ISSN: 2377-3766
Factor impacto JCR: 3.741 (2020)
Categ. JCR: ROBOTICS rank: 9 / 28 = 0.321 (2020) - Q2 - T1
Factor impacto SCIMAGO: 1.123 - Artificial Intelligence (Q1) - Biomedical Engineering (Q1) - Computer Science Applications (Q1) - Mechanical Engineering (Q1) - Control and Optimization (Q1) - Control and Systems Engineering (Q1) - Human-Computer Interaction (Q1) - Computer Vision and Pattern Recognition (Q1)
Financiación: info:eu-repo/grantAgreement/ES/AEI-FEDER/RTI2018-096903-B-I00
Financiación: info:eu-repo/grantAgreement/ES/DGA/T45-17R
Financiación: info:eu-repo/grantAgreement/ES/MCIU-AEI-FEDER/PGC2018-096367-B-I00
Tipo y forma: Artículo (PrePrint)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
 Derechos reservados por el editor de la revista
Derechos reservados por el editor de la revista
Exportado de SIDERAL (2025-10-17-14:12:06)
Visitas y descargas
Idioma: Inglés
DOI: 10.1109/LRA.2020.2967274
Año: 2020
Publicado en: IEEE Robotics and Automation Letters 5, 2 (2020), 1255-1262
ISSN: 2377-3766
Factor impacto JCR: 3.741 (2020)
Categ. JCR: ROBOTICS rank: 9 / 28 = 0.321 (2020) - Q2 - T1
Factor impacto SCIMAGO: 1.123 - Artificial Intelligence (Q1) - Biomedical Engineering (Q1) - Computer Science Applications (Q1) - Mechanical Engineering (Q1) - Control and Optimization (Q1) - Control and Systems Engineering (Q1) - Human-Computer Interaction (Q1) - Computer Vision and Pattern Recognition (Q1)
Financiación: info:eu-repo/grantAgreement/ES/AEI-FEDER/RTI2018-096903-B-I00
Financiación: info:eu-repo/grantAgreement/ES/DGA/T45-17R
Financiación: info:eu-repo/grantAgreement/ES/MCIU-AEI-FEDER/PGC2018-096367-B-I00
Tipo y forma: Artículo (PrePrint)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
Exportado de SIDERAL (2025-10-17-14:12:06)
Enlace permanente:
Visitas y descargas
Este artículo se encuentra en las siguientes colecciones:
Artículos > Artículos por área > Máster Universitario en Ingeniería de Sistemas y Automática
Registro creado el 2025-01-26, última modificación el 2025-10-17