Cam-CONVS: Camera-aware multi-scale convolutions for single-view depth
Facil, J.M. (Universidad de Zaragoza) ; Ummenhofer, B. ; Zhou, H. ; Montesano, L. (Universidad de Zaragoza) ; Brox, T. ; Civera, J. (Universidad de Zaragoza)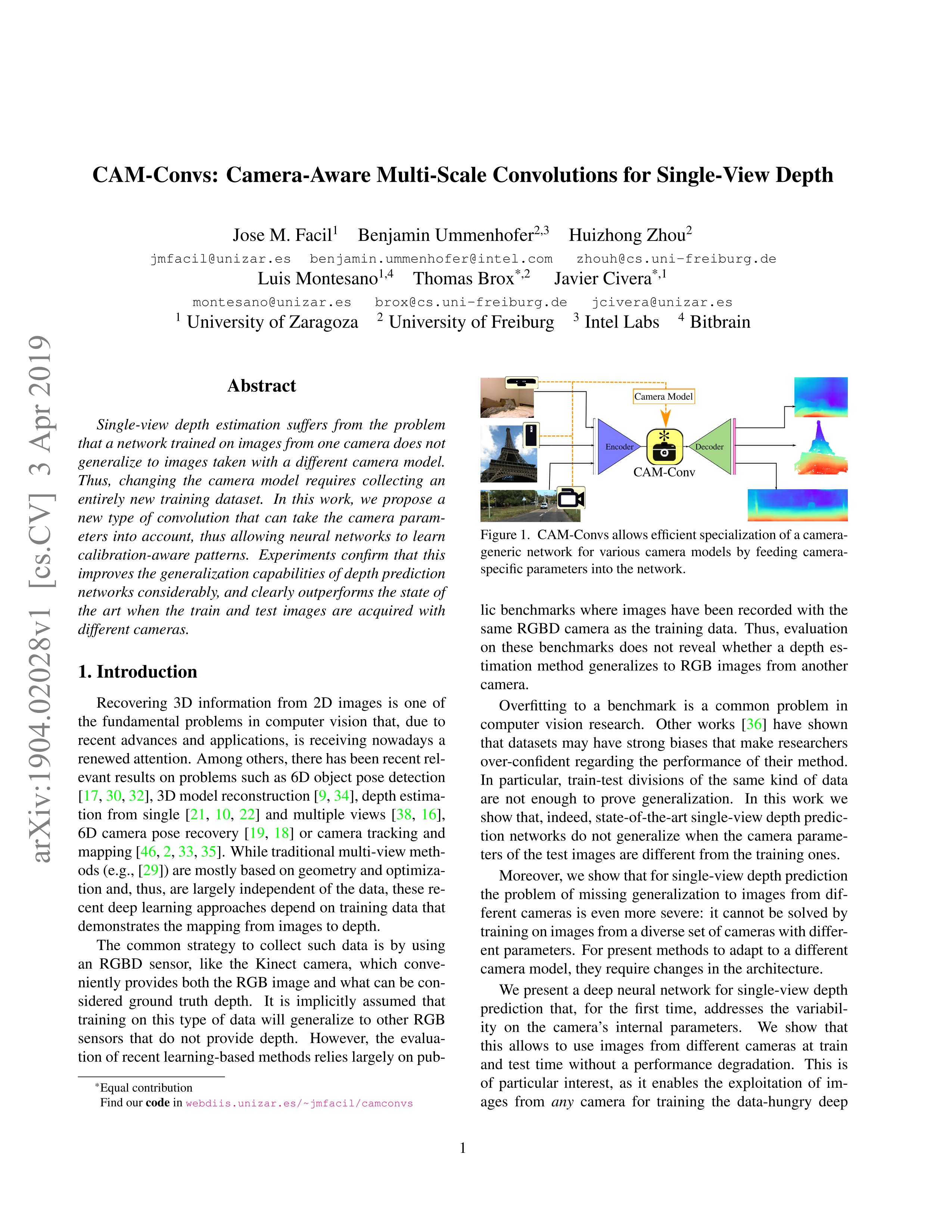
Resumen: Single-view depth estimation suffers from the problem that a network trained on images from one camera does not generalize to images taken with a different camera model. Thus, changing the camera model requires collecting an entirely new training dataset. In this work, we propose a new type of convolution that can take the camera parameters into account, thus allowing neural networks to learn calibration-aware patterns. Experiments confirm that this improves the generalization capabilities of depth prediction networks considerably, and clearly outperforms the state of the art when the train and test images are acquired with different cameras.
Idioma: Inglés
DOI: 10.1109/CVPR.2019.01210
Año: 2019
Publicado en: Proceedings - IEEE Computer Society Conference on Computer Vision and Pattern Recognition 2019 (2019), 11818-11827
ISSN: 1063-6919
Factor impacto SCIMAGO: 13.396 - Software - Computer Vision and Pattern Recognition
Financiación: info:eu-repo/grantAgreement/ES/DGA-FSE/T45-17R
Financiación: info:eu-repo/grantAgreement/EC/H2020/688007/EU/A gardening robot for rose, hedge and topiary trimming/TrimBot2020
Financiación: info:eu-repo/grantAgreement/ES/MINECO/DPI2015-67275
Tipo y forma: Article (PostPrint)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
Área (Departamento): Área Lenguajes y Sistemas Inf. (Dpto. Informát.Ingenie.Sistms.)
 All rights reserved by journal editor
All rights reserved by journal editor
Exportado de SIDERAL (2025-10-17-14:15:53)
Visitas y descargas
Idioma: Inglés
DOI: 10.1109/CVPR.2019.01210
Año: 2019
Publicado en: Proceedings - IEEE Computer Society Conference on Computer Vision and Pattern Recognition 2019 (2019), 11818-11827
ISSN: 1063-6919
Factor impacto SCIMAGO: 13.396 - Software - Computer Vision and Pattern Recognition
Financiación: info:eu-repo/grantAgreement/ES/DGA-FSE/T45-17R
Financiación: info:eu-repo/grantAgreement/EC/H2020/688007/EU/A gardening robot for rose, hedge and topiary trimming/TrimBot2020
Financiación: info:eu-repo/grantAgreement/ES/MINECO/DPI2015-67275
Tipo y forma: Article (PostPrint)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
Área (Departamento): Área Lenguajes y Sistemas Inf. (Dpto. Informát.Ingenie.Sistms.)
Exportado de SIDERAL (2025-10-17-14:15:53)
Permalink:
Visitas y descargas
Este artículo se encuentra en las siguientes colecciones:
Articles > Artículos por área > Ingeniería de Sistemas y Automática
Articles > Artículos por área > Lenguajes y Sistemas Informáticos
Record created 2025-02-01, last modified 2025-10-17