RoboEarth Semantic Mapping: A Cloud Enabled Knowledge-Based Approach
Riazuelo, L. ; Tenorth, M. ; Di Marco, D. ; Salas, M. ; Gálvez-López, D. ; Mösenlechner, L. ; Kunze, L. ; Beetz, M. ; Tardós, J.D. (Universidad de Zaragoza) ; Montano, L. (Universidad de Zaragoza) ; Martínez Montiel, J.M. (Universidad de Zaragoza)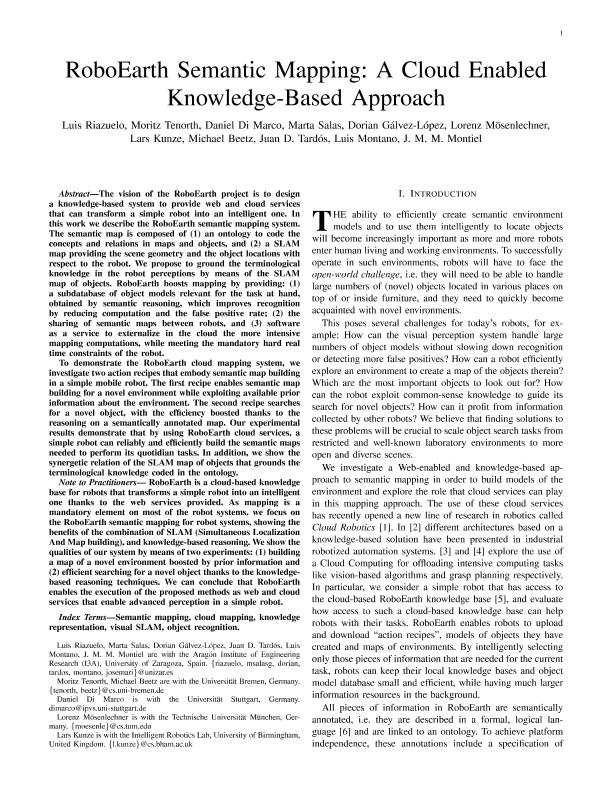
Resumen: The vision of the RoboEarth project is to design a knowledge-based system to provide web and cloud services that can transform a simple robot into an intelligent one. In this work, we describe the RoboEarth semantic mapping system. The semantic map is composed of: 1) an ontology to code the concepts and relations in maps and objects and 2) a SLAM map providing the scene geometry and the object locations with respect to the robot. We propose to ground the terminological knowledge in the robot perceptions by means of the SLAM map of objects. RoboEarth boosts mapping by providing: 1) a subdatabase of object models relevant for the task at hand, obtained by semantic reasoning, which improves recognition by reducing computation and the false positive rate; 2) the sharing of semantic maps between robots; and 3) software as a service to externalize in the cloud the more intensive mapping computations, while meeting the mandatory hard real time constraints of the robot. To demonstrate the RoboEarth cloud mapping system, we investigate two action recipes that embody semantic map building in a simple mobile robot. The first recipe enables semantic map building for a novel environment while exploiting available prior information about the environment. The second recipe searches for a novel object, with the efficiency boosted thanks to the reasoning on a semantically annotated map. Our experimental results demonstrate that, by using RoboEarth cloud services, a simple robot can reliably and efficiently build the semantic maps needed to perform its quotidian tasks. In addition, we show the synergetic relation of the SLAM map of objects that grounds the terminological knowledge coded in the ontology.
Idioma: Inglés
DOI: 10.1109/TASE.2014.2377791
Año: 2015
Publicado en: IEEE Transactions on Automation Science and Engineering 12, 2 (2015), 432-443
ISSN: 1545-5955
Factor impacto JCR: 2.696 (2015)
Categ. JCR: AUTOMATION & CONTROL SYSTEMS rank: 8 / 59 = 0.136 (2015) - Q1 - T1
Factor impacto SCIMAGO: 1.558 - Electrical and Electronic Engineering (Q1) - Control and Systems Engineering (Q1)
Financiación: info:eu-repo/grantAgreement/EC/FP7/248942/EU/RoboEarth: robots sharing a knowledge base for world modelling and learning of actions/RoboEarth
Financiación: info:eu-repo/grantAgreement/EC/FP7/288533/EU/Web-enabled and Experience-based Cognitive Robots that Learn Complex Everyday Manipulation Tasks/ROBOHOW.COG
Financiación: info:eu-repo/grantAgreement/ES/MINECO/DPI2012-32100
Financiación: info:eu-repo/grantAgreement/ES/MINECO/DPI2012-32168
Tipo y forma: Artículo (PostPrint)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
 Derechos reservados por el editor de la revista
Derechos reservados por el editor de la revista
Exportado de SIDERAL (2021-01-21-08:16:06)
Visitas y descargas
Idioma: Inglés
DOI: 10.1109/TASE.2014.2377791
Año: 2015
Publicado en: IEEE Transactions on Automation Science and Engineering 12, 2 (2015), 432-443
ISSN: 1545-5955
Factor impacto JCR: 2.696 (2015)
Categ. JCR: AUTOMATION & CONTROL SYSTEMS rank: 8 / 59 = 0.136 (2015) - Q1 - T1
Factor impacto SCIMAGO: 1.558 - Electrical and Electronic Engineering (Q1) - Control and Systems Engineering (Q1)
Financiación: info:eu-repo/grantAgreement/EC/FP7/248942/EU/RoboEarth: robots sharing a knowledge base for world modelling and learning of actions/RoboEarth
Financiación: info:eu-repo/grantAgreement/EC/FP7/288533/EU/Web-enabled and Experience-based Cognitive Robots that Learn Complex Everyday Manipulation Tasks/ROBOHOW.COG
Financiación: info:eu-repo/grantAgreement/ES/MINECO/DPI2012-32100
Financiación: info:eu-repo/grantAgreement/ES/MINECO/DPI2012-32168
Tipo y forma: Artículo (PostPrint)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
Exportado de SIDERAL (2021-01-21-08:16:06)
Enlace permanente:
Visitas y descargas
Este artículo se encuentra en las siguientes colecciones:
Artículos > Artículos por área > Máster Universitario en Ingeniería de Sistemas y Automática
Registro creado el 2015-12-22, última modificación el 2021-01-21