Nonlinear Bounded State Estimation for Sensorless Control of an Electromagnetic Device
Moya-Lasheras, Eduardo (Universidad de Zaragoza) ; Sagues, Carlos (Universidad de Zaragoza) ; Ramirez-Laboreo, Edgar (Universidad de Zaragoza) ; Llorente, Sergio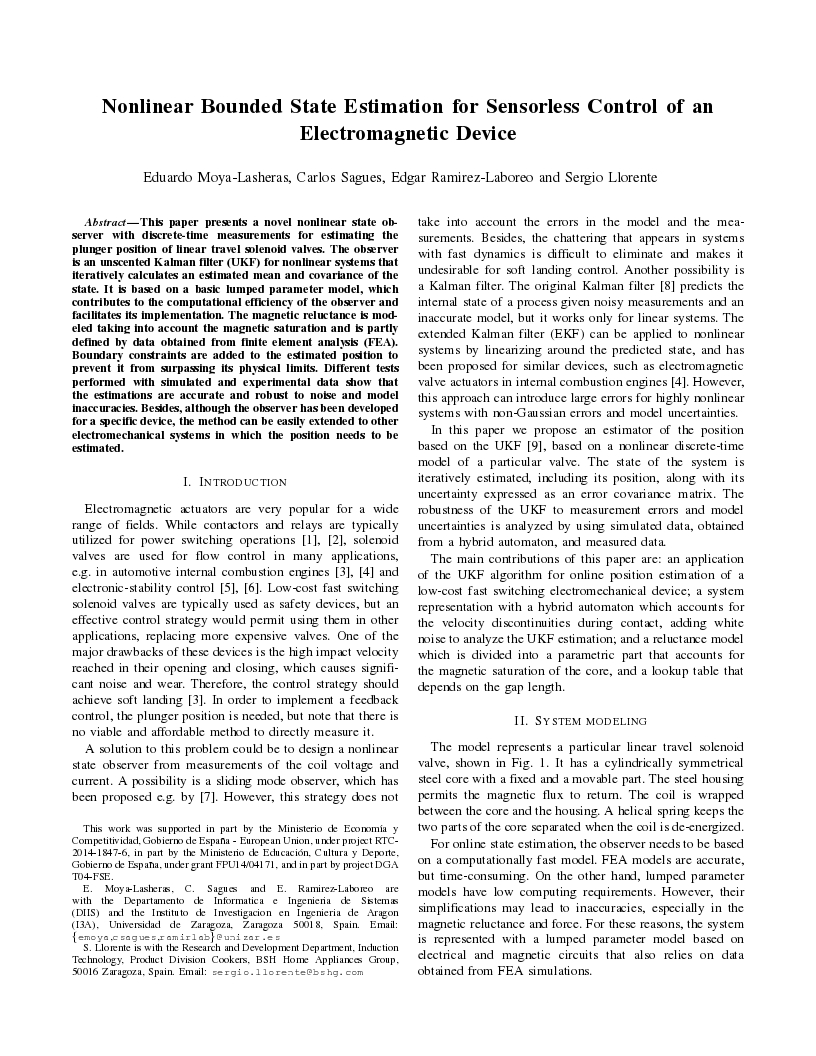
Resumen: This paper presents a novel nonlinear state observer with discrete-time measurements for estimating the plunger position of linear travel solenoid valves. The observer is an unscented Kalman filter (UKF) for nonlinear systems that iteratively calculates an estimated mean and covariance of the state. It is based on a basic lumped parameter model, which contributes to the computational efficiency of the observer and facilitates its implementation. The magnetic reluctance is modeled taking into account the magnetic saturation and is partly defined by data obtained from finite element analysis (FEA). Boundary constraints are added to the estimated position to prevent it from surpassing its physical limits. Different tests performed with simulated and experimental data show that the estimations are accurate and robust to noise and model inaccuracies. Besides, although the observer has been developed for a specific device, the method can be easily extended to other electromechanical systems in which the position needs to be estimated.
Idioma: Inglés
DOI: 10.1109/CDC.2017.8264407
Año: 2017
Publicado en: Proceedings of the IEEE Conference on Decision & Control 2017, 17523006 (2017), 5050-5055
ISSN: 0743-1546
Financiación: info:eu-repo/grantAgreement/ES/DGA/T04-FSE
Financiación: info:eu-repo/grantAgreement/ES/MEC/FPU14-04171
Financiación: info:eu-repo/grantAgreement/ES/MINECO/RTC-2014-1847-6
Tipo y forma: Artículo (PostPrint)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
 Derechos reservados por el editor de la revista
Derechos reservados por el editor de la revista
Exportado de SIDERAL (2023-01-11-10:05:20)
Visitas y descargas
Idioma: Inglés
DOI: 10.1109/CDC.2017.8264407
Año: 2017
Publicado en: Proceedings of the IEEE Conference on Decision & Control 2017, 17523006 (2017), 5050-5055
ISSN: 0743-1546
Financiación: info:eu-repo/grantAgreement/ES/DGA/T04-FSE
Financiación: info:eu-repo/grantAgreement/ES/MEC/FPU14-04171
Financiación: info:eu-repo/grantAgreement/ES/MINECO/RTC-2014-1847-6
Tipo y forma: Artículo (PostPrint)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
Exportado de SIDERAL (2023-01-11-10:05:20)
Enlace permanente:
Visitas y descargas
Este artículo se encuentra en las siguientes colecciones:
Artículos > Artículos por área > Máster Universitario en Ingeniería de Sistemas y Automática
Registro creado el 2020-07-07, última modificación el 2023-01-11