G-Loc: tightly-coupled graph localization with prior topo-metric information
Montano-Oliván, Lorenzo ; Placed, Julio A. (Universidad de Zaragoza) ; Montano, Luis (Universidad de Zaragoza) ; Lázaro, María T.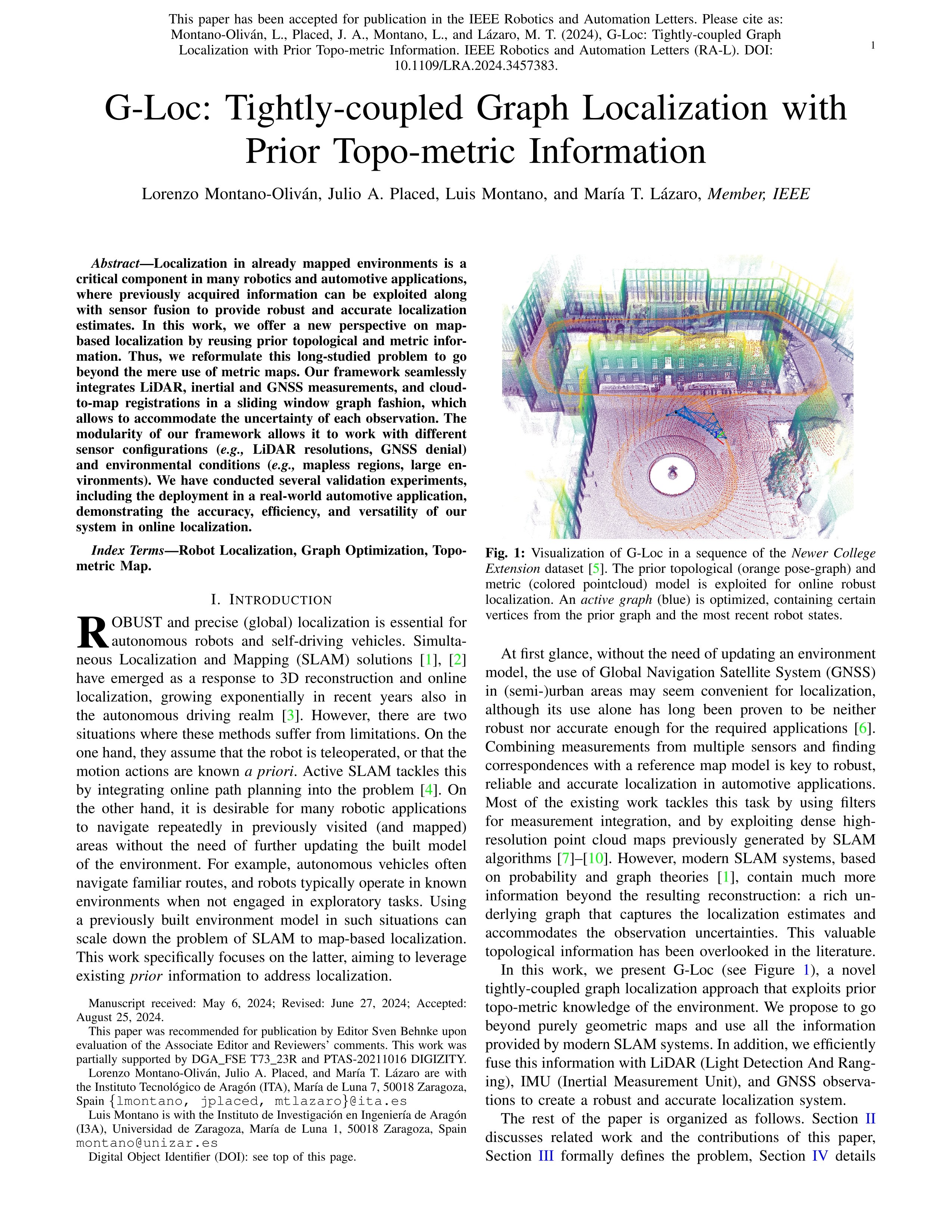
Resumen: Localization in already mapped environments is a critical component in many robotics and automotive applications, where previously acquired information can be exploited along with sensor fusion to provide robust and accurate localization estimates. In this letter, we offer a new perspective on map-based localization by reusing prior topological and metric information. Thus, we reformulate this long-studied problem to go beyond the mere use of metric maps. Our framework seamlessly integrates LiDAR, inertial and GNSS measurements, and cloud-to-map registrations in a sliding window graph fashion, which allows to accommodate the uncertainty of each observation. The modularity of our framework allows it to work with different sensor configurations (e.g., LiDAR resolutions, GNSS denial) and environmental conditions (e.g., mapless regions, large environments). We have conducted several validation experiments, including the deployment in a real-world automotive application, demonstrating the accuracy, efficiency, and versatility of our system in online localization.
Idioma: Inglés
DOI: 10.1109/LRA.2024.3457383
Año: 2024
Publicado en: IEEE Robotics and Automation Letters 9, 11 (2024), 9167-9174
ISSN: 2377-3766
Factor impacto JCR: 5.3 (2024)
Categ. JCR: ROBOTICS rank: 12 / 48 = 0.25 (2024) - Q1 - T1
Factor impacto CITESCORE: 10.3 - Mechanical Engineering (Q1) - Computer Science Applications (Q1) - Control and Systems Engineering (Q1) - Human-Computer Interaction (Q1) - Control and Optimization (Q1) - Biomedical Engineering (Q1) - Computer Vision and Pattern Recognition (Q1) - Artificial Intelligence (Q1)
Factor impacto SCIMAGO: 1.481 - Artificial Intelligence (Q1) - Biomedical Engineering (Q1) - Computer Science Applications (Q1) - Mechanical Engineering (Q1) - Control and Optimization (Q1) - Control and Systems Engineering (Q1) - Human-Computer Interaction (Q1) - Computer Vision and Pattern Recognition (Q1)
Financiación: info:eu-repo/grantAgreement/ES/DGA-FSE/T73_23R
Tipo y forma: Artículo (PostPrint)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
 Derechos reservados por el editor de la revista
Derechos reservados por el editor de la revista
Exportado de SIDERAL (2026-02-17-20:36:19)
Visitas y descargas
Idioma: Inglés
DOI: 10.1109/LRA.2024.3457383
Año: 2024
Publicado en: IEEE Robotics and Automation Letters 9, 11 (2024), 9167-9174
ISSN: 2377-3766
Factor impacto JCR: 5.3 (2024)
Categ. JCR: ROBOTICS rank: 12 / 48 = 0.25 (2024) - Q1 - T1
Factor impacto CITESCORE: 10.3 - Mechanical Engineering (Q1) - Computer Science Applications (Q1) - Control and Systems Engineering (Q1) - Human-Computer Interaction (Q1) - Control and Optimization (Q1) - Biomedical Engineering (Q1) - Computer Vision and Pattern Recognition (Q1) - Artificial Intelligence (Q1)
Factor impacto SCIMAGO: 1.481 - Artificial Intelligence (Q1) - Biomedical Engineering (Q1) - Computer Science Applications (Q1) - Mechanical Engineering (Q1) - Control and Optimization (Q1) - Control and Systems Engineering (Q1) - Human-Computer Interaction (Q1) - Computer Vision and Pattern Recognition (Q1)
Financiación: info:eu-repo/grantAgreement/ES/DGA-FSE/T73_23R
Tipo y forma: Artículo (PostPrint)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
Exportado de SIDERAL (2026-02-17-20:36:19)
Enlace permanente:
Visitas y descargas
Este artículo se encuentra en las siguientes colecciones:
Artículos > Artículos por área > Máster Universitario en Ingeniería de Sistemas y Automática
Registro creado el 2024-10-15, última modificación el 2026-02-17