Open-Vocabulary Online Semantic Mapping for SLAM
Berriel Martins, Tomás (Universidad de Zaragoza) ; Oswald, Martin R. ; Civera, Javier (Universidad de Zaragoza)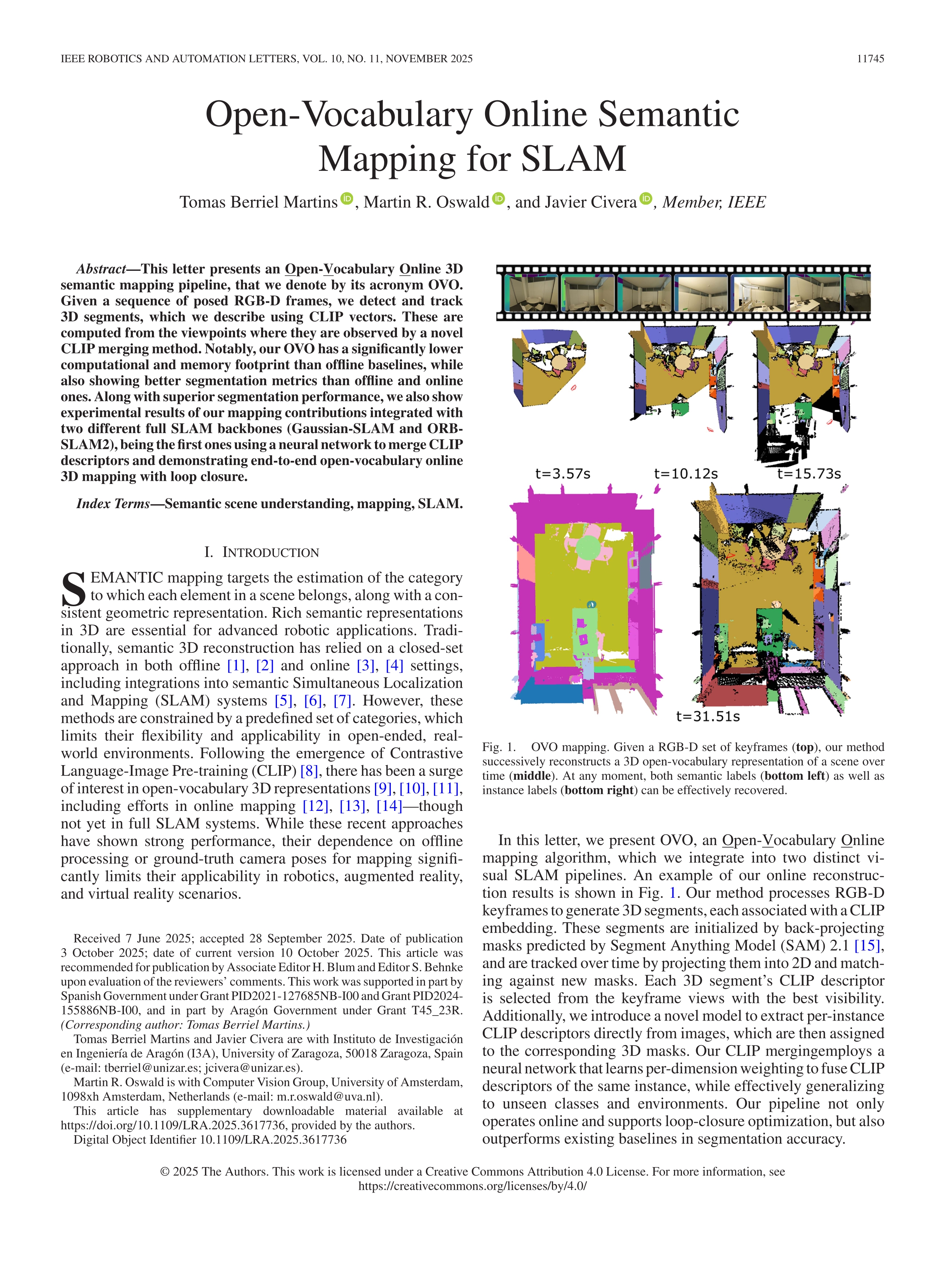
Resumen: This letter presents an Open-Vocabulary Online 3D semantic mapping pipeline, that we denote by its acronym OVO. Given a sequence of posed RGB-D frames, we detect and track 3D segments, which we describe using CLIP vectors. These are computed from the viewpoints where they are observed by a novel CLIP merging method. Notably, our OVO has a significantly lower computational and memory footprint than offline baselines, while also showing better segmentation metrics than offline and online ones. Along with superior segmentation performance, we also show experimental results of our mapping contributions integrated with two different full SLAM backbones (Gaussian-SLAM and ORB-SLAM2), being the first ones using a neural network to merge CLIP descriptors and demonstrating end-to-end open-vocabulary online 3D mapping with loop closure.
Idioma: Inglés
DOI: 10.1109/LRA.2025.3617736
Año: 2025
Publicado en: IEEE Robotics and Automation Letters 10, 11 (2025), 11745-11752
ISSN: 2377-3766
Financiación: info:eu-repo/grantAgreement/ES/AEI/PID2024-155886NB-I00
Financiación: info:eu-repo/grantAgreement/ES/DGA/T45-23R
Financiación: info:eu-repo/grantAgreement/ES/MICINN/PID2021-127685NB-I00
Tipo y forma: Artículo (Versión definitiva)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
 Debe reconocer adecuadamente la autoría, proporcionar un enlace a la licencia e indicar si se han realizado cambios. Puede hacerlo de cualquier manera razonable, pero no de una manera que sugiera que tiene el apoyo del licenciador o lo recibe por el uso que hace.
Debe reconocer adecuadamente la autoría, proporcionar un enlace a la licencia e indicar si se han realizado cambios. Puede hacerlo de cualquier manera razonable, pero no de una manera que sugiera que tiene el apoyo del licenciador o lo recibe por el uso que hace.
Exportado de SIDERAL (2026-01-12-11:10:48)
Visitas y descargas
Idioma: Inglés
DOI: 10.1109/LRA.2025.3617736
Año: 2025
Publicado en: IEEE Robotics and Automation Letters 10, 11 (2025), 11745-11752
ISSN: 2377-3766
Financiación: info:eu-repo/grantAgreement/ES/AEI/PID2024-155886NB-I00
Financiación: info:eu-repo/grantAgreement/ES/DGA/T45-23R
Financiación: info:eu-repo/grantAgreement/ES/MICINN/PID2021-127685NB-I00
Tipo y forma: Artículo (Versión definitiva)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
Exportado de SIDERAL (2026-01-12-11:10:48)
Enlace permanente:
Visitas y descargas
Este artículo se encuentra en las siguientes colecciones:
Artículos > Artículos por área > Máster Universitario en Ingeniería de Sistemas y Automática
Registro creado el 2026-01-12, última modificación el 2026-01-12