Sweep-Your-Map: efficient coverage planning for aerial teams in large-scale environments
Morilla-Cabello, David (Universidad de Zaragoza) ; Bartolomei, Luca ; Teixeira, Lucas ; Montijano, Eduardo (Universidad de Zaragoza) ; Chli, Margarita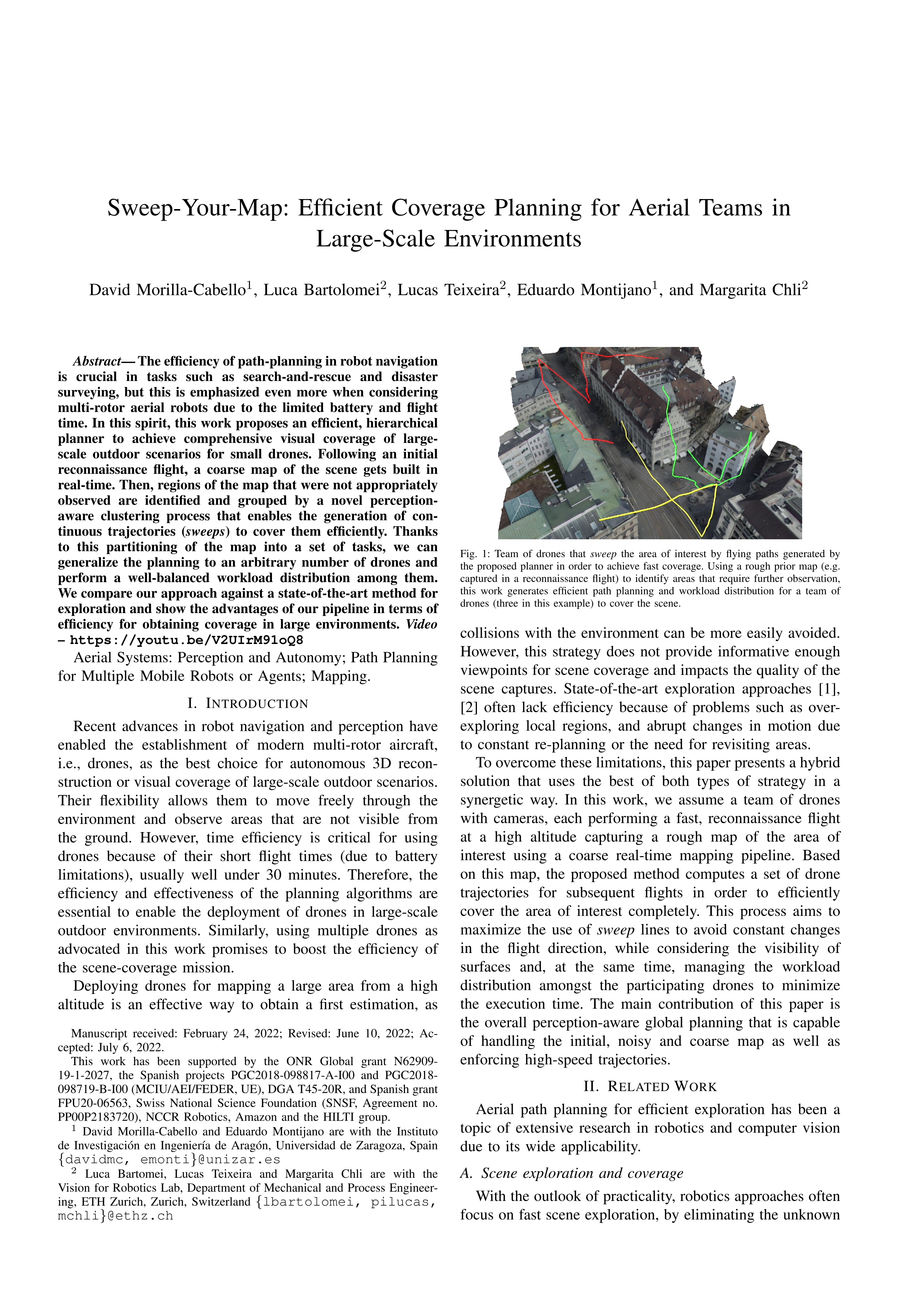
Resumen: The efficiency of path-planning in robot navigation is crucial in tasks such as search-and-rescue and disaster surveying, but this is emphasized even more when considering multirotor aerial robots due to the limited battery and flight time. In this spirit, this work proposes an efficient, hierarchical planner to achieve comprehensive visual coverage of large-scale outdoor scenarios for small drones. Following an initial reconnaissance flight, a coarse map of the scene gets built in real-time. Then, regions of the map that were not appropriately observed are identified and grouped by a novel perception-aware clustering process that enables the generation of continuous trajectories (sweeps) to cover them efficiently. Thanks to this partitioning of the map into a set of tasks, we can generalize the planning to an arbitrary number of drones and perform a well-balanced workload distribution among them. We compare our approach against a state-of-theart method for exploration and show the advantages of our pipeline in terms of efficiency for obtaining coverage in large environments.
Idioma: Inglés
DOI: 10.1109/LRA.2022.3194686
Año: 2022
Publicado en: IEEE Robotics and Automation Letters 7, 4 (2022), 10810-10817
ISSN: 2377-3766
Factor impacto JCR: 5.2 (2022)
Categ. JCR: ROBOTICS rank: 10 / 30 = 0.333 (2022) - Q2 - T2
Factor impacto CITESCORE: 7.6 - Engineering (Q1) - Mathematics (Q1) - Computer Science (Q1)
Factor impacto SCIMAGO: 1.693 - Artificial Intelligence (Q1) - Biomedical Engineering (Q1) - Computer Science Applications (Q1) - Mechanical Engineering (Q1) - Control and Optimization (Q1) - Control and Systems Engineering (Q1) - Human-Computer Interaction (Q1) - Computer Vision and Pattern Recognition (Q1)
Tipo y forma: Article (PostPrint)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
Exportado de SIDERAL (2026-02-12-20:41:30)
Visitas y descargas
Idioma: Inglés
DOI: 10.1109/LRA.2022.3194686
Año: 2022
Publicado en: IEEE Robotics and Automation Letters 7, 4 (2022), 10810-10817
ISSN: 2377-3766
Factor impacto JCR: 5.2 (2022)
Categ. JCR: ROBOTICS rank: 10 / 30 = 0.333 (2022) - Q2 - T2
Factor impacto CITESCORE: 7.6 - Engineering (Q1) - Mathematics (Q1) - Computer Science (Q1)
Factor impacto SCIMAGO: 1.693 - Artificial Intelligence (Q1) - Biomedical Engineering (Q1) - Computer Science Applications (Q1) - Mechanical Engineering (Q1) - Control and Optimization (Q1) - Control and Systems Engineering (Q1) - Human-Computer Interaction (Q1) - Computer Vision and Pattern Recognition (Q1)
Tipo y forma: Article (PostPrint)
Área (Departamento): Área Ingen.Sistemas y Automát. (Dpto. Informát.Ingenie.Sistms.)
Exportado de SIDERAL (2026-02-12-20:41:30)
Permalink:
Visitas y descargas
Este artículo se encuentra en las siguientes colecciones:
articulos > articulos-por-area > ingenieria_de_sistemas_y_automatica
Notice créée le 2026-01-28, modifiée le 2026-02-12